Paso 3: Hacer el chasis


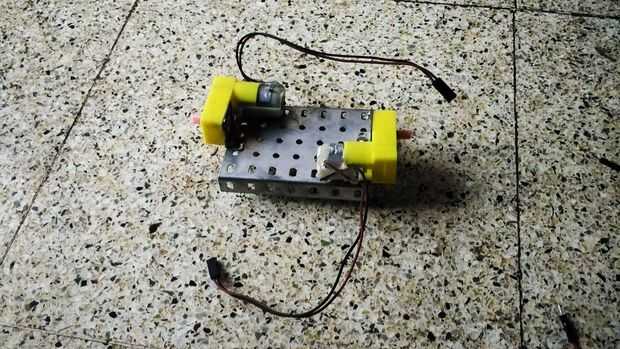

> primero fijar la abrazadera en forma de L dos a la dc motorreductores por medio de tornillos como se muestra
> a continuación fijar los dos motores con CC al conector de metal de la manera como se muestra (llegué a la conclusión que de esta manera tiene la mejor simetría para mantener eficientemente el equilibrio del bot)
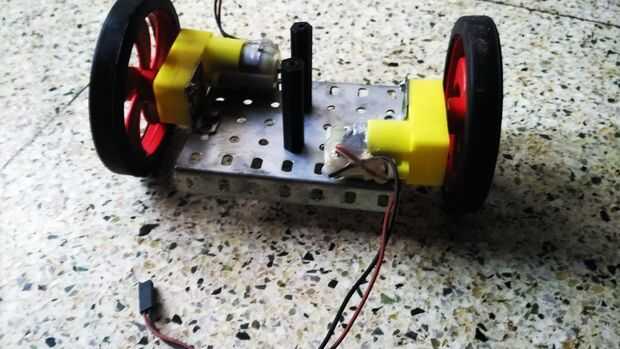
> fijar las dos ruedas a los motores
> Fije la tarjeta del chasis al bot así montado con la ayuda de clavos y tornillos.
> fijar otro perno en la parte delantera del chasis en el centro y conectar la rueda bola a ella
Esto termina la parte mecánica del robot.













