Paso 6: Parte Robot
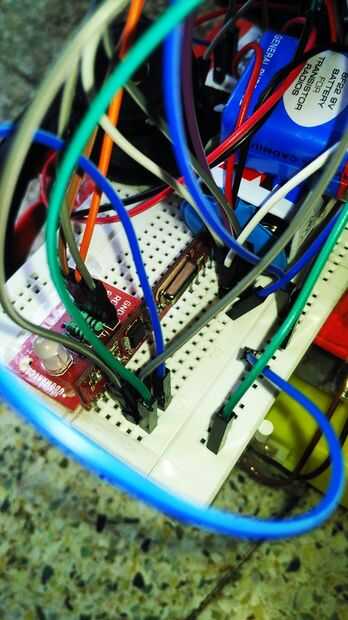

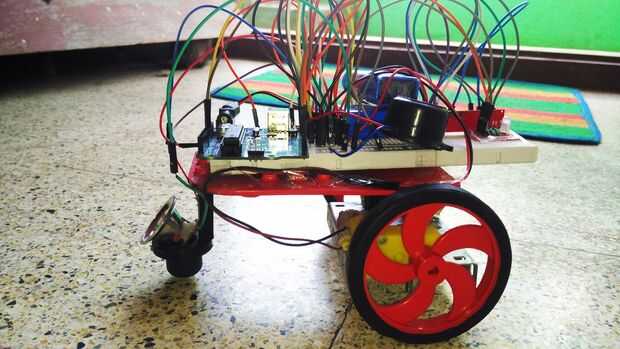
> Montar primero el tablero de pan en el chasis hasta ahora montado con cinta de doble cara.
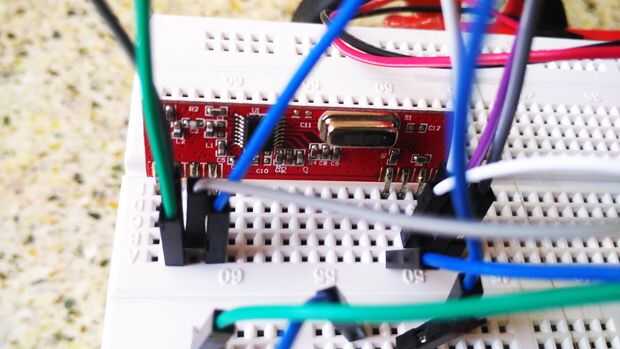
> colocar el ic y el receptor en el tablero de pan.
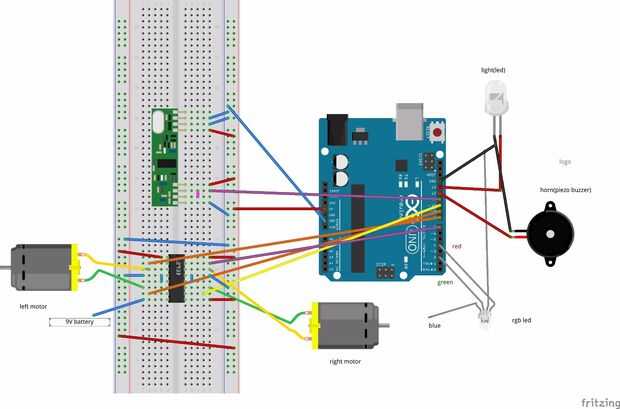
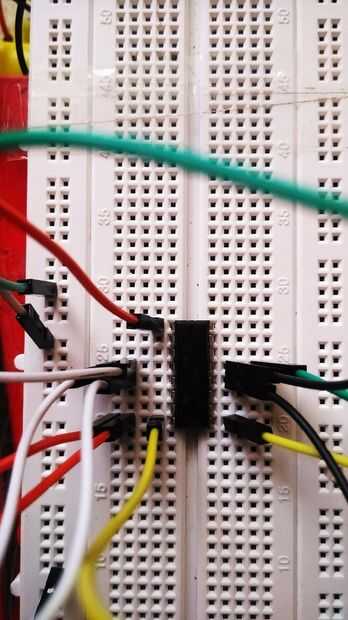
> realizar las conexiones en el conductor del motor como se muestra
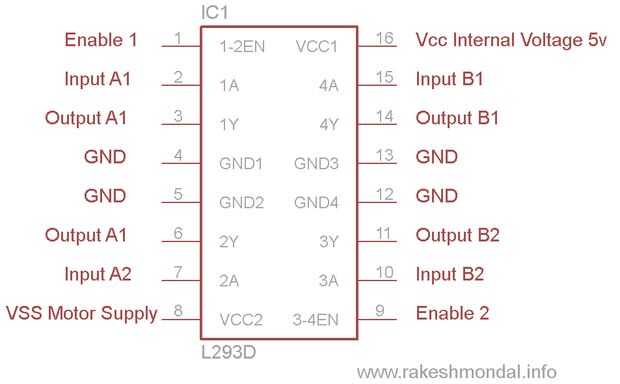
4,5,12,13 PIN a gnd
Pin 1,9,16 a +5v(vcc)
PIN 3.6 a la izquierda motor(output)
PIN 11,14 a derecha motor(output)
pin 2,7,10,15 para pernos 8,9,10,7 de arduino(inputs) del receptor
Pin 8 a batería de 9V
> hacer las conexiones al receptor como se muestra
PIN vcc a +5v(vcc)
PIN gnd del receptor a gnd de arduino de recibir.
datos de PIN al pin 11 de arduino
>> se refieren a las conexiones del circuito.
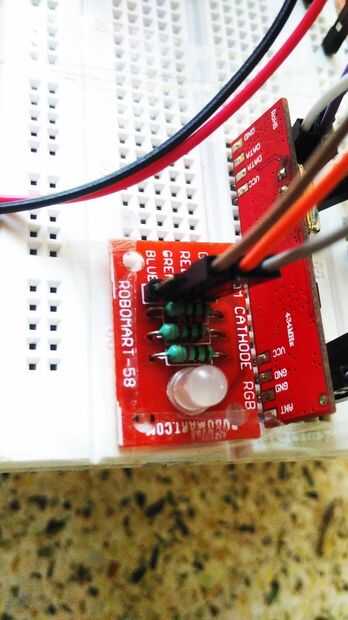
> conectar más buzzer(horn) al pin 12 de arduino receptor
> led al pin 13 de arduino receptor













