Paso 5: Conecte los conectores de servo
Utilizaremos digitales pins 3 y 4 para los servos; Estos no son los mismos pernos que el BoE-Bot usa por defecto, y no ser utilizando conectores de servo de BoE. En cambio, vamos a usar longitudes cortas del alambre para ejecutar el poder, tierra y señal a los conectores de servo.
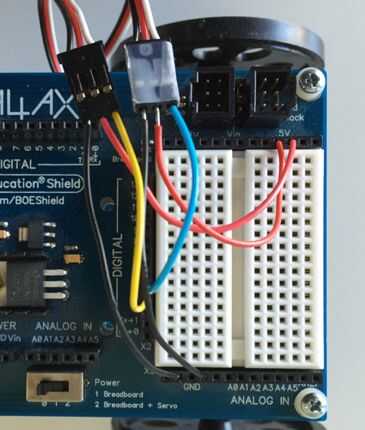
1) ejecute un cable de 2" de rojo en el enchufe (cable rojo) de centro cada cable del conector de servo a"5V"tomas de encabezado en la parte superior del tablero del BoE
2) ejecute un cable negro de 2" de la toma de cable negro de cada conector de servo a tomas de encabezado"GND"en el extremo inferior de la placa del BoE.
3) ejecute un cable de 2" azul del pin digital 4 a la toma de cable blanco en el conector del servo derecho.
4) ejecute un cable de 2" amarillo del pin digital 3 a la toma de cable blanco en el conector del servo izquierdo.
5) cuando haya terminado, el cableado debe parecerse a la foto de arriba.
6) en este punto debe conectar Arduino al ordenador mediante cable USB-B; Esta conexión será necesaria durante el perfil editorial y de programación de Arduino.



")


")






