Paso 7: Conectar el hardware
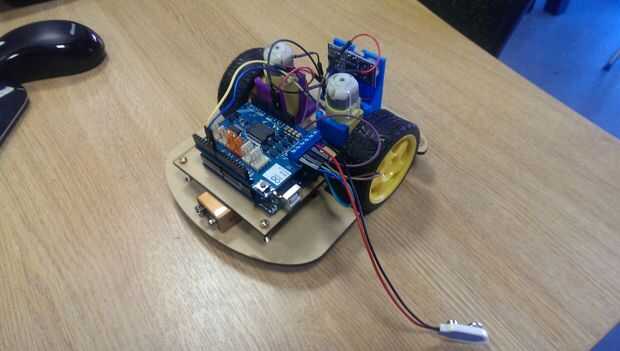

El conjunto del chasis es relativamente simple y debe ser evidente en las imágenes anteriores.
Las conexiones eléctricas también son bastante simples.
El primer paso es conectar tu escudo del motor en el Arduino Uno. Usted notará que los pernos se alineen exactamente para ser recibidos por el Uno mismo. A continuación necesitará conectar los motores y el soporte de la batería de 9V.
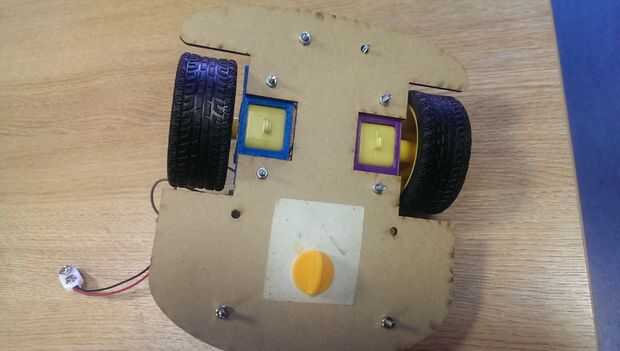
Vamos a comenzar con el soporte de la batería. El cable rojo deberá ser conectado al terminal Vin con el negro va a la terminal GND. Cabe señalar que a veces terminales pueden marcar + o - en su lugar. "+" significa lo mismo que Vin, Vcc, V +. "-" significa lo mismo que tierra.
Para atar con alambre los motores; te darás cuenta porque he usado extensiones de los cables del motor, los colores no coinciden con el esquema habitual de color rojo/negro. Los motores son como bombillas en que poder se puede aplicar a ellos en cualquier dirección. Usted no notará la diferencia con una bombilla, pero un motor girará en diferentes direcciones, si una batería se conecta todo en él. Cuando usted enciende el robot más tarde de lo predeterminado (en el código) es impulsar. Si esto sucede no en realidad hay algunos métodos de corregir esto para que no se preocupe!
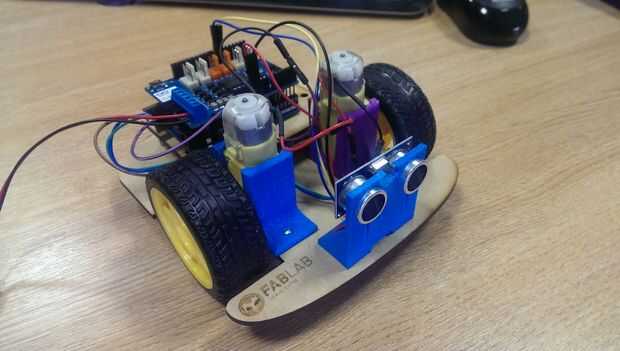
El sensor de ultrasonidos HC-SR04 tiene 4 pines; VCC, GND, gatillo (Pin 7) y Eco (Pin 6). Todos los sensores de alimentación (Vcc) y espalda (GND) de ellos. El gatillo es el pin que recibirá una señal del arduino envía un "ping" ultrasónica. El código de arduino registrará el tiempo en que esta señal es enviada hacia fuera. El pin de echo se escucha para la reflexión de este sonido. Este es un buen ejemplo de bio-mimetismo.
Cada uno de los 4 pines están marcadas en el lado del sensor y la electrónica. A continuación, veremos algunos problemas potenciales y cómo solucionar problemas.

![R2-D2 [R2] (ATtiny2313 pared evitando Robot)](https://foto.askix.com/thumb/170x110/d/5d/d5d79e70aced7f4a772d55b7fd829ee7.jpg "R2-D2 [R2] (ATtiny2313 pared evitando Robot)")











