
Esta es la primera de una larga serie de tutoriales dirigidos a proporcionar una guía de principiantes y un tutorial basado en el Microcontrolador AVR de Atmel Atmega32. Voy a mostrar que, a través de ejemplos y proyectos, cómo programar y prever funciones de este microcontrolador y cuáles son los usos y aplicaciones.
Con microcontroladores en general, es bueno saber que estos pequeños chips se encuentran en todas partes. Usted puede encontrarlos en microondas, electrodomésticos, coches, televisores, etc.. Estos microcontroladores controlan y sensación de la electrónica y el ambiente circundante. Por ejemplo, microcontroladores pueden proporcionar una salida a la pantalla, motor, LED, etc., sensor de inclinación usando un accellerometer, luz, velocidad angular utilizando un giroscopio de MEMS (sistema micrométrica), sonido, codificadores para el movimiento, temperatura, el ambiente y botón o teclado entrada.
Para dar una comprensión básica del microcontrolador, el microcontrolador Atmega32 AVR se considera una computadora en un chip. El microcontrolador es capaz de ejecutar un conjunto de instrucciones en forma de un programa. Para estos tutoriales, vamos a usar el lenguaje de programación es C++.
Una de las cosas fundamentales para entender (y esto está muy bien), es que tienes control sobre todos los bolos. Para un principiante, esto puede ser un concepto difícil de comprender, especialmente si usted no tiene experiencia con la electrónica. No te desanimes, que le guiará a través de cada pequeño detalle. Cada pin tiene una asignación de distintiva, o puede ser utilizado como una función de entrada o de salida, con algunas excepciones, como las clavijas de alimentación.
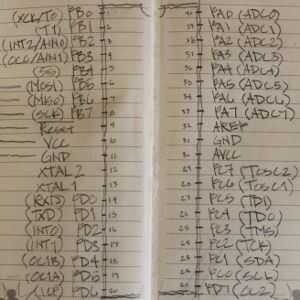
En el lado izquierdo del chip, mirar forma la parte superior y el triángulo pequeño es en la parte superior izquierda, hay 20 pines (este es un microcontrolador de 40 pines). El primero a partir de la parte superior izquierda es las patillas de PB0-7. Es un total de 8 pines como el índice de estos pines y todo en el programa inicia con un índice de 0. Este conjunto de pernos se llaman "Puerto B" y hay 3 otros puertos etiquetados de la A la D. Estos puertos puede configurarse para recibir información y se llama entrada y pueden configurarse para enviar voltaje en alguna forma llamado salida. Pines de poder general para recibir la energía para el chip llaman VCC y GND. Todos sino un pin del puerto D (PD0-6) también se encuentra en el lado izquierdo (parte inferior). PD7 (Pin 7 del puerto D) es solo a partir del lado derecho del microcontrolador.
Continuando en el lado derecho y el final del puerto D, Puerto C continuó desde la esquina inferior hacia arriba. A partir de ahí, pins favoritos sigan, análogo a los pines digitales. Estos pernos tienen la capacidad para percibir el entorno con la ayuda de los componentes que se alimentan estos pins una tensión analógica. No te preocupes no análogo de la comprensión o incluso digital en este punto, se explica en mayor detalle más adelante. Estos pins convertidor digital analógico componer puertos A.
Un ejemplo del uso de la analógica a digital conversión sería estar, decir, detectando la temperatura. Puede conectar un componente que convierte la temperatura a un nivel de voltaje llamado un termistor a uno de los pines del puerto A y el microcontrolador será convertir este voltaje a un número de 0 a 255 (un número de 8 bits - mayor resolución es posible en 10 bits). El programa que está escrito y almacenado en el microcontrolador puede utilizar esta temperatura y responder de una manera específica. Por ejemplo, si tienes el termistor contra una olla hirvienda, el microcontrolador puede responder y proporcionar una salida a otro pin que suena y parpadea una luz. Otras características de este y otros microcontroladores, que no sean la programación actual es el espacio de la programación (donde el programa se almacena en el chip y cuanto espacio tienes), memoria o espacio para los datos y las variables que utilizará el programa, y por último, hay un reloj incorporado en el chip que cuenta. La cuenta puede ser en muchos diferentes velocidades dependiendo de la velocidad de la viruta y el divisor que es seleccionado para la velocidad.
Esto esta empezando a complicar, por lo que se copia de seguridad. La cuenta puede ser en segundos, milisegundos, microsegundos, o lo determine para el programa y la aplicación que seleccione. Como esta serie de tutoriales está basada en ejemplos, dará una gran cantidad de detalle. Por supuesto, el detalle de la introducción sería imposible, y si eres muy aventurero, usted puede echar un vistazo a la hoja de datos y el manual para este microprocesador, pero no dejes que ese documento enorme te mecen de querer aprender esta tecnología más increíble. Una vez que aprendas, no hay ningún límite a la aplicación de robots diminutos, a grandes escaladas maravillas arquitectónicas que se mueven y emiten a veces efectos de iluminación espectaculares, que interactúan con el medio ambiente.
Espero que les haya gustado la parte 1 de esta serie de microcontroladores.









")
