Paso 1: cableado
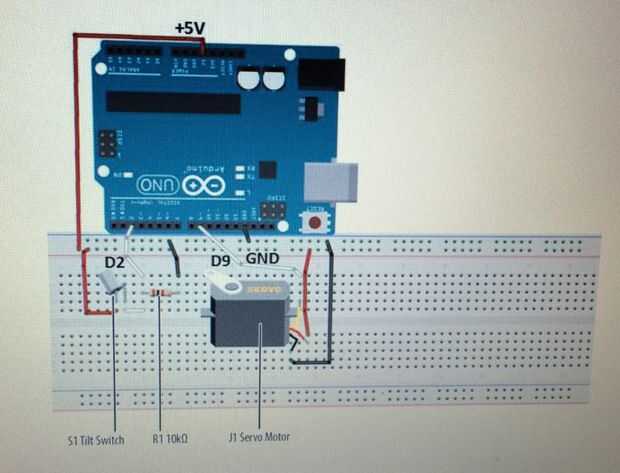

Conecte los cables como ves aquí. Retire al sensor de inclinación y conectarse un cable de la pinza donde estaba el segundo cable que está en manos de otro clip de cocodrilo conectar el circuito. Al elegir su criado Consejo sugiero usar un tamaño más pequeño.
Programa:
#include / / include biblioteca Servo
int inPin = 2; el interruptor de control de tilt es alambrado a la clavija de Arduino D2
int leer; la lectura actual del pin de entrada
Servo myservo; crear objeto motor servo
void setup()
{
myservo.Attach(9); Acople motor servo al pin 9 del Arduino
pinMode (inPin, entrada); hacer pin 2 una entrada
}
void loop()
{
lectura = digitalRead(inPin); almacenar datos digitales en variable
if(Reading == High) {/ / comprobar datos digitales con valor objetivo
myservo.Write(180); Si datos digitales es igual a valor de destino,
motor servo gira 180 grados
Delay(15); espera 15ms para rotación
}
Else {/ / si la lectura no es igual al valor de destino,
myservo.Write(0); Gire el motor servo a 0 grados
Delay(15); espera 15ms para rotación
}
}













