Paso 1:
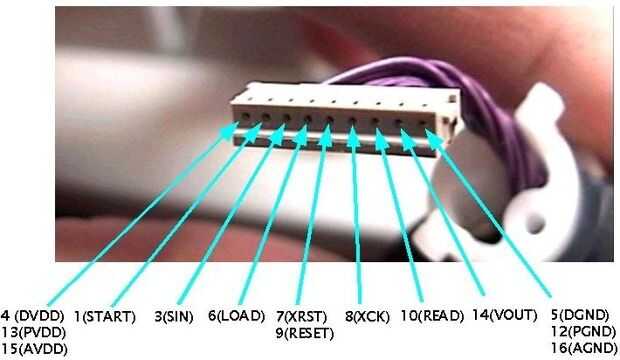
Lo primero que debe hacer antes de comenzar debe crear un conector adecuado para la cámara (después de abrir la caja del cartucho estructurado con un destornillador tri-wing, desconectar y quitar la cámara de la estructura principal). Os adjunto una foto del pinout, muchas personas utilizan esta imagen, así que no sé a quién darle el crédito (un http://www.seattlerobotics.org/encoder/200205/gbcam.html) aquí. Usé un conector IDC-10 para conectar a mi vieja tabla PIC (de otro proyecto).
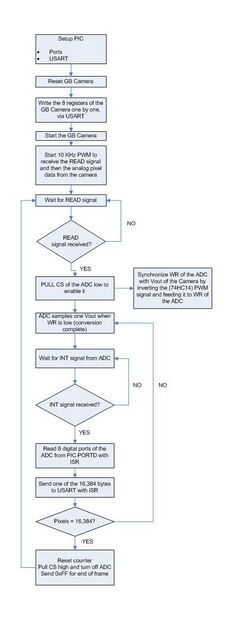
En el siguiente paso nos vas mirando los esquemas y cómo realmente funciona el sistema.

")








 con una plataforma giratoria - no una cámara giratoria 3D!")


