Paso 2:
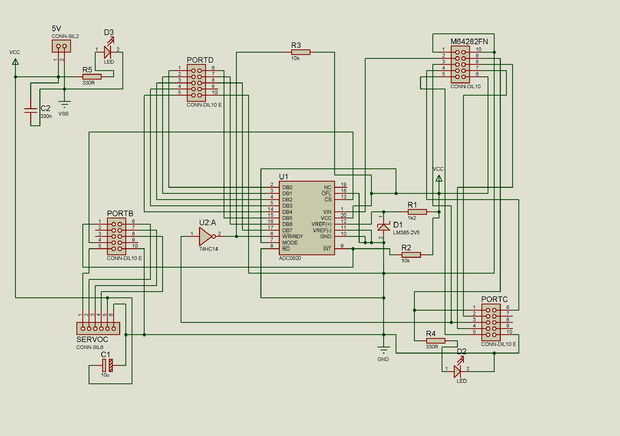
PORTC del PIC se utiliza para comunicarse con la cámara, PORTD se dedica a la salida del ADC de 8 bits y PORTB se utiliza para el ADC CS y servos, que realmente no lograron controlar en ese momento (traté de observar los valores de píxeles sobre la marcha, encontrar las coordenadas del píxel más brillante primero con una pequeña fórmula y ajustar los ángulos de servo de acuerdo). Servos simplemente enloqueció, y perdí la paciencia :|
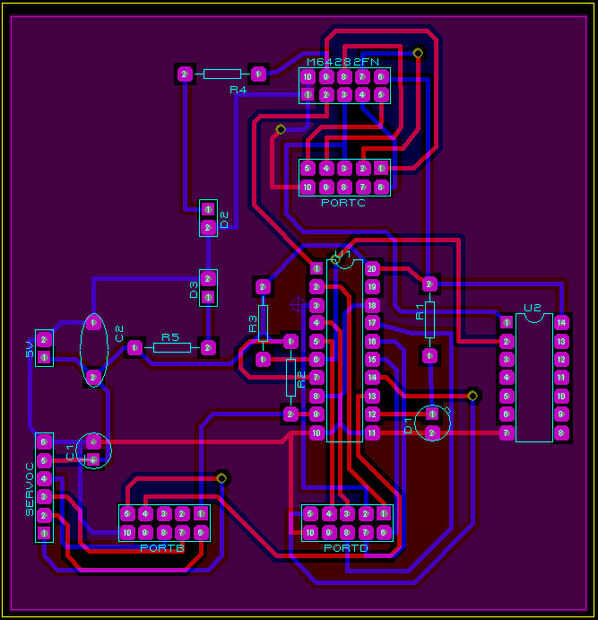
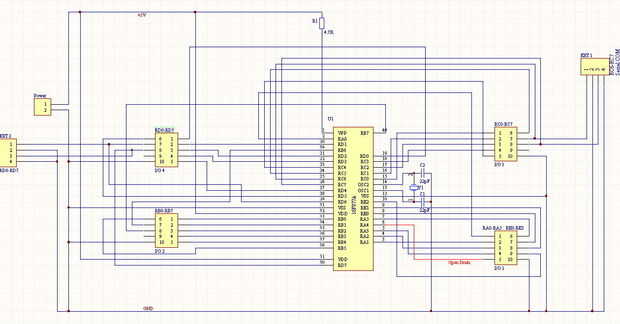
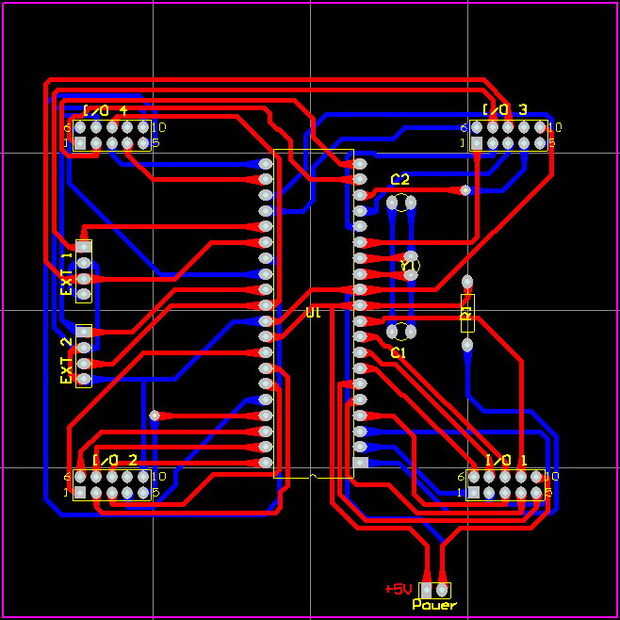
Los LEDs son para mostrar el tablero captura energía y marco. Los esquemas son un poco enredados ya que no me importaba mucho sobre perno etiquetado entonces (para rápidamente crear el PCB), así que por favor tenga paciencia. No voy a adjuntar los archivos PCB y Junta de PIC esquemático (pero preste atención a los cuadros para la orientación del pin), ya que es básicamente un tablero PIC de 40 pines con un cristal y todos los puertos están conectados a los conectores IDC-10.
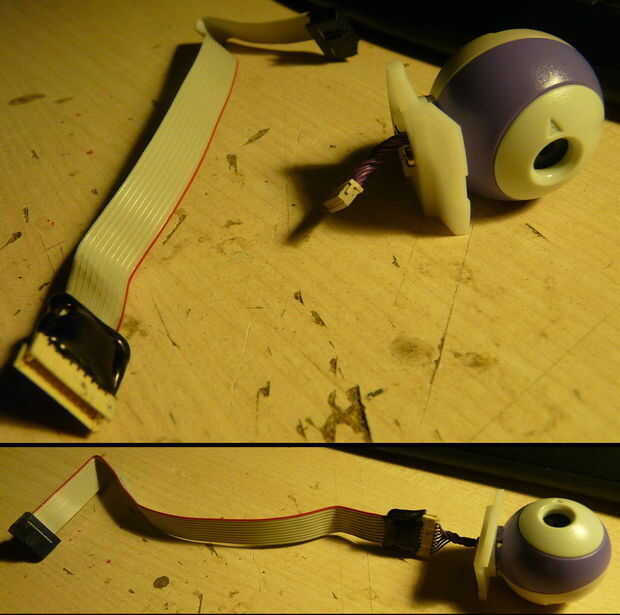
El pinout del conector M6428FN en el esquema es el siguiente, por lo que puede hacer un simple adaptador / conector para la cámara como se ve en la imagen:
1 - GND
2 - Vout a ADC (datos de imagen en analógico)
3 - XCK bit-bang por el pecado, RESET, carga y arranque (y 10 KHz PWM con 50% DC para obtener los valores de píxeles), también dispara ADC
conversión para cada valor de píxel (74HC14 invierte esta señal para el ADC iniciar la conversión,) después de una lectura exitosa, envía ADC y la interrupción en el PIC y el PIC envía el valor digital para su USART, que finalmente va a nuestra PC.
4-carga señal de cámara (registrarse conjunto permiten parámetro)
Señal 5-START a cámara (sensor de imagen de inicio)
6 - VCC (toda la analógica y digital potencia)
7-SIN señal para escribir las reglas de la cámara (parámetro de entrada de datos)
Señal 8-RESET a la cámara (Reset parámetro registros)
Señal de lectura 9 (imagen) de cámara
10 - GND
Para obtener más información sobre estos terminales, por favor consulte la hoja de datos de sensor de imagen adjunta sobre los próximos pasos. Vas a entender los esquemas mejor al leer los comentarios en los archivos de código.

")








 con una plataforma giratoria - no una cámara giratoria 3D!")


