Paso 8: Crear la GUI (interfaz gráfica de usuario) para el Robot
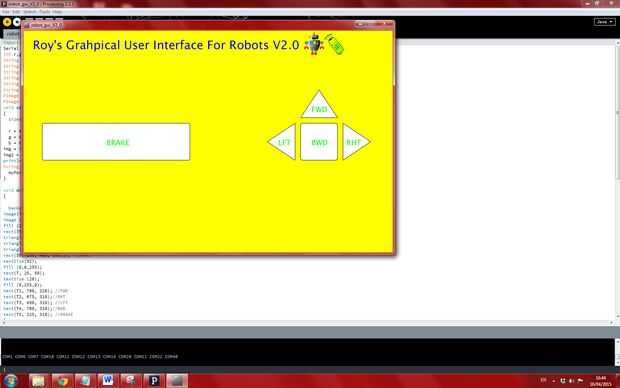
Lo que deja de lado este robot de otros es el hecho de que tiene una interfaz de usuario todo construida especialmente para él. Para hacerlo, he utilizado procesamiento. Utilizando las funciones de gráficos, había creado y alineados cuadrados y triángulos para simular las flechas del teclado. El programa recibe entrada desde el teclado y parpadea las formas según que botón se presionó (se vea el video al principio para demo). A continuación, envía señales a través de Bluetooth serial port en consecuencia (Recordad, los que escucha el Arduino?). De esta forma que podemos controlar el robot de forma remota mediante un teclado.
Controles:
Hacia adelante = flecha arriba
Hacia atrás = flecha abajo
Derecha = flecha derecha
Izquierda = flecha izquierda
no olvide que puede modificar el código y añadir más características interesantes.
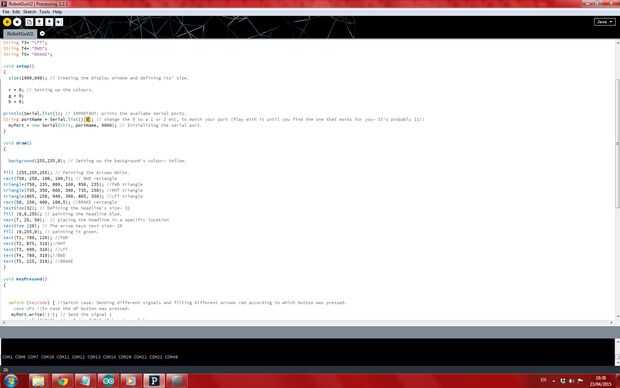
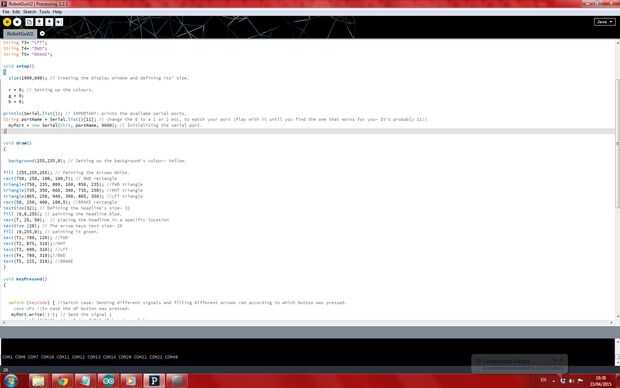
Así que sin más rehacer, ir a Processing.org y descargar procesamiento. Luego, se usa para abrir el RobotGuiV2.
Esta parte es bastante complicada. Cada vez que ejecute el programa de una lista de los puertos disponibles aparecen en la sección de salida. Y de hecho, 40 de puerto está disponible. Sin embargo, cada vez que entramos en el puerto 40 en el programa, nos sale un error. Bueno la verdad es que tienes que comprobar que el puerto trabaja para usted. El que a mi me funciono es 11, y probablemente trabajan para usted, pero si no, entonces simplemente jugar con los puertos disponibles, hasta que llegue.
Otra vez, he aclarado todo el código con comentarios gris.












")
