Paso 9: Integrado sin escobillas CES
Bueno... casi perfecta.
Overclocking de la TB6588FG:
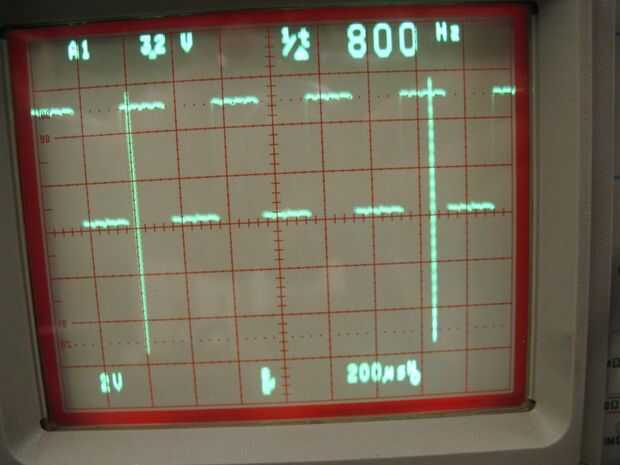
El TB6588FG tiene una variedad de opciones que se pueden "programar" colocando resistencias a pasadores de halar hacia arriba o hacia abajo. Una tal opción es una protección de falla que desactiva el motor si se excede una frecuencia máxima de conmutación. La máxima frecuencia es la frecuencia de reloj interna del chip dividida por 3 * 2 ^ 11. En la velocidad de reloj por defecto de 5MHz, se trata de 814Hz. La hoja de datos, que es un poco escasa, descuida mencionar qué sucede si ignora el error y decir el motor al acelerar. Resulta que, el conductor se sigue aumentando el voltaje de la unidad mientras mantiene la frecuencia en Hz 814, causando el motor para sacar una gran cantidad de corriente sin producir ningún poder más.
Desafortunadamente, los motores de HXM1400-2000 pueden levantarse a frecuencias mucho más altas. En 2, 000 rpm/V y 11.1V, velocidad sin carga es de 22, 200 rpm, o 367 Hz. Pero el motor tiene 14 postes, por lo que la frecuencia de sin carga es 7 * 367 rps = 2, 590Hz. La velocidad de carga, con una hélice, es mucho menor que esto, pero todavía superiores a 800Hz.
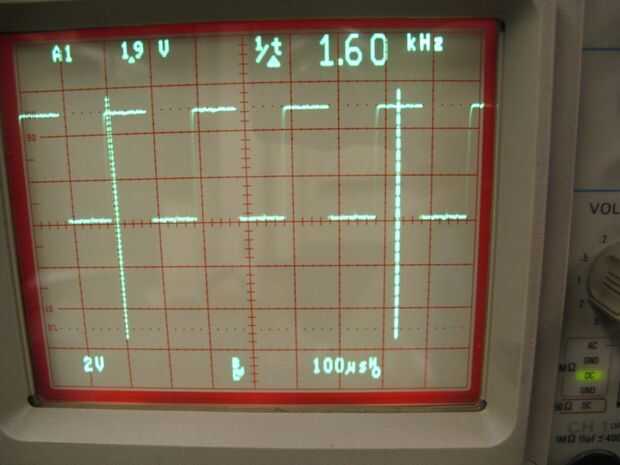
Por suerte, la hoja de datos también descuida mencionar por qué la velocidad de reloj es de 5MHz; es simplemente el valor predeterminado utilizado en todos los ejemplos. La velocidad de reloj se establece por un resistor y un condensador que forman la base de tiempo de un oscilador. Reduce a la mitad el valor de la resistencia, a 10k (R9, R27, R46 y R65), empujando el reloj de 10MHz y la frecuencia de conmutación máxima a 1Hz, 628. Esto parece ser suficiente para cubrir el rango de velocidades de carga para el HXM1400-2000 de 11.1V. Supongo que la frecuencia de reloj puede ir aún más alta, pero no has probado. Como un efecto secundario de la duplicación de la frecuencia de reloj, la frecuencia PWM también se duplicó. Esto puede aumentar las pérdidas en conmutación, pero opté por la más baja de los valores posibles de la frecuencia PWM para compensar esto.
Entradas analógicas
Otra cosa buena acerca de los chips de controlador de motor de TB6588FG es que tienen entradas analógicas tensión motor de comando, en lugar de las entradas PWM servo-estilo de comerciales sin escobillas CES. Sinuosidal de servo tiene una tasa de refresco de 20ms por defecto, que es un poco en el lado lento para un cuadrotor pequeño como este. Entradas analógicas pueden ser arbitrariamente rápido (hasta la frecuencia de muestreo dentro de la TB6588FG).
Para generar las señales analógicas, usar capacidades PWM de Arduino, pero de muy alta frecuencia. (62,5 kHz si tengo la configuración correcta.) Entonces, yo filtro la Sinuosidal con un filtro RC de primer orden (tercera imagen). Es la constante de tiempo del filtro:
Tau = 3kΩ * 0.1μF = 0.3ms.
La frecuencia de corte es:
F_C = 1 / (2 * pi * tau) = 531Hz.
Esto es suficientemente rápido para capturar comandos de velocidad transitoria, pero lento lo suficiente para filtrar la mayor parte de la onda PWM.
En general, el TB6588FG es un chip pequeño bastante sorprendente. Se puede conducir cada uno de los motores con hasta 3A e incluso pueden revertir a través de una entrada digital. Esto puede ser conveniente en caso de la soldadura de los cables del motor en el orden equivocado. Incluso podría ser capaz de volar boca abajo, aunque yo no he conseguido que funcione todavía. Si quieres saber más sobre el TB6588FG, aquí es Toshiba hoja de datos para él.













