Paso 9: Construir la instalación
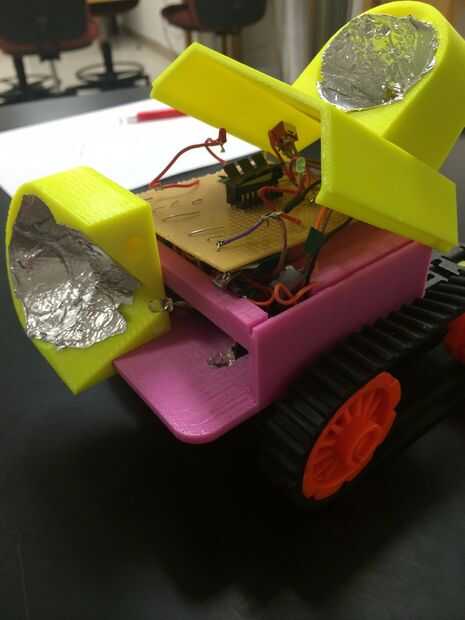

Una vez que el Arduino, el interruptor y el tablero están conectados, coloque el Arduino en el caso. Utilice el cable para conectar la entrada de interruptor de alambre V 7.5 al extremo positivo de la batería y conecte el extremo positivo de la batería de 9 V al conmutador Vin entrado. La tierra de la batería de 9 V puede ser colocada en la otra ranura de la tierra en el Arduino y tierra de paquete de la batería puede soldarse a la línea de tierra en el tablero. Por último, soldadura peg 3 al cable negro del motor derecho y peg 6 al cable rojo del motor derecho. Soldar la clavija 14 al cable negro del motor izquierda y peg 11 al cable rojo del motor izquierdo.
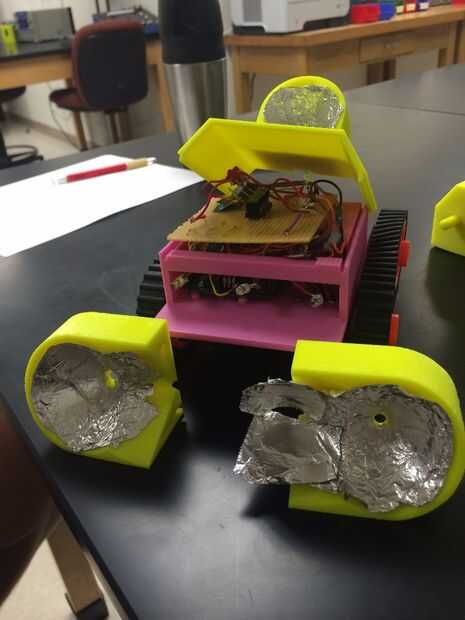
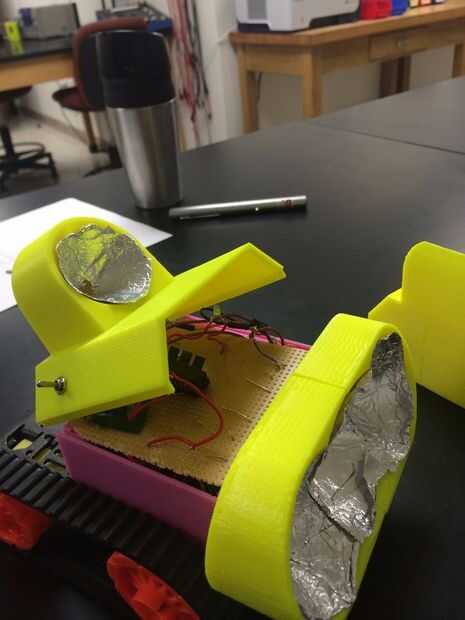
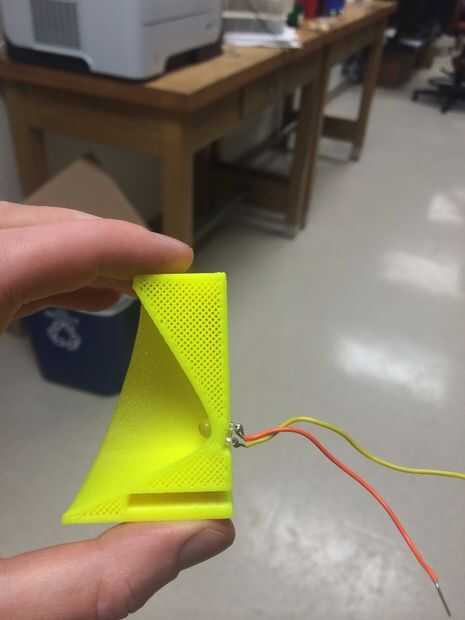
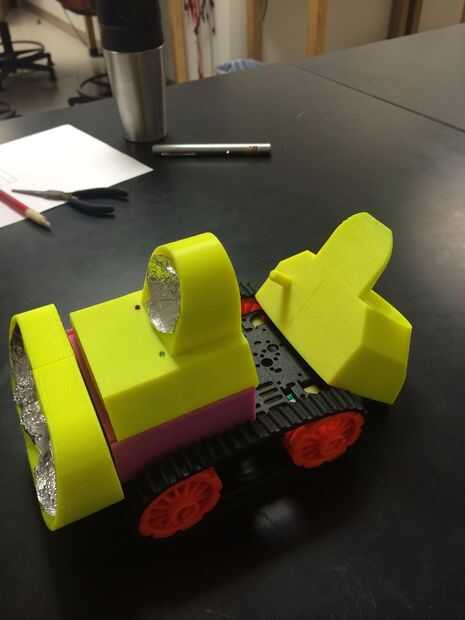
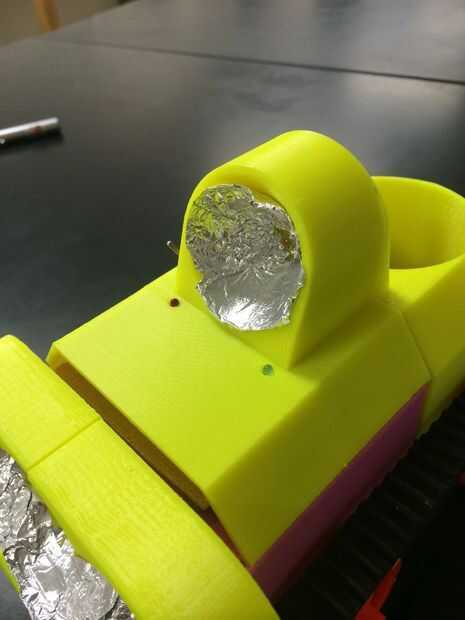
El interruptor puede colocarse entonces en la pieza impresa 3d superior junto con los LEDs, por lo que puede cubrir el cableado. El fotodiodo superior debe venir por la parte trasera de este y ajuste perfectamente dentro del cono. La pieza posterior se desliza luego en su lugar. Una de las piezas frontales deslice en su lugar y encaja el fotodiodo adecuado en lugar. Luego, parcialmente Deslice la pieza siguiente en para que los fotodiodos se pueden caber en él. Una vez que ellos se adapten, deslice todo el camino para que quepa cómodamente con el Monte de Arduino. Luego cubrimos los conos con los fotodiodos con una capa de papel de aluminio para ayudar a luz golpearon más eficazmente.
Esto completa el proceso de crear un perro electrónico.




.")








