Paso 10: Instale el software de controlador y comprobar todas las obras

En un PC, copia el código de git hub de la misma manera como lo hicimos en el robot.
Puede no tener git instalado en su PC. Si no siga el las instrucciones de git hub.
También tienes la opción de descargar el código en un archivo zip, aunque aconsejaría instalar GIT y copiar los archivos mediante la clonación el repositorio.
usted necesitará fecha el archivo de lego-robot/client/keys.js con su personal publicar y suscribirse las llaves.
Cuando haya terminado, abra el archivo lego-robot/client/buttons.html en un explorador web. Ahora debe ser capaz de controlar tu robot usando los botones de control.
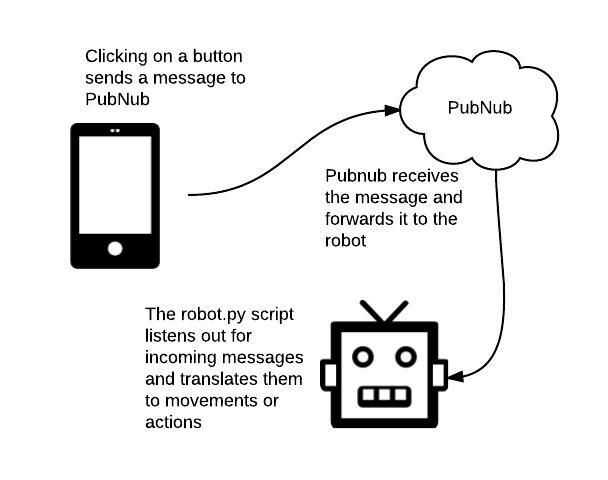
El diagrama de arriba muestra lo que está sucediendo:
- Al hacer clic en un botón se envía un mensaje a pubnub (con su clave de publicar)
- PubNub remite entonces al robot que...
- Es escucha (usando la tecla suscribirse) para mensajes
- El robot se traduce entonces en una acción.
Usé pubNub como su libre, rápido (en tiempo real) y simplifica enormemente el envío y recepción de mensajes utilizando un API muy agradable.
Usted puede cavar en el código de cliente y servidor y ver los mensajes utilizando claves simples como "forwards" y "hacia atrás".
También hay un controlador de joystick estilo en lego-robot/client/joystick.html.
Será mejorar estos controladores y agregar unos nuevos todos los
tiempo, así que si quieres actualizar el software, puede utilizar el comando "git pull". También siéntase libre para contribuir al repositorio de git y crear más controles amigables.
Ahora ya está todo listo para comprobar que el movimiento funciona OK.
En el terminal de Pi, cambie el directorio en servidor/robot de lego y el tipo:
- sudo python robot.py
Esto pone en marcha un script en python para escuchar hacia fuera para los mensajes entrantes de Pubnub.
Ahora tratan de presionar algunos botones en el controlador, debería ver estas respuestas recibidas en el Terminal de Pi (como se muestra en la foto de arriba) y el robot.py traduce estos mensajes a los movimientos mediante la asignación de señales en los GPIO de Pi.
Usted debe ser capaz de moverse el robot.

 con Video Stream en vivo!!")










