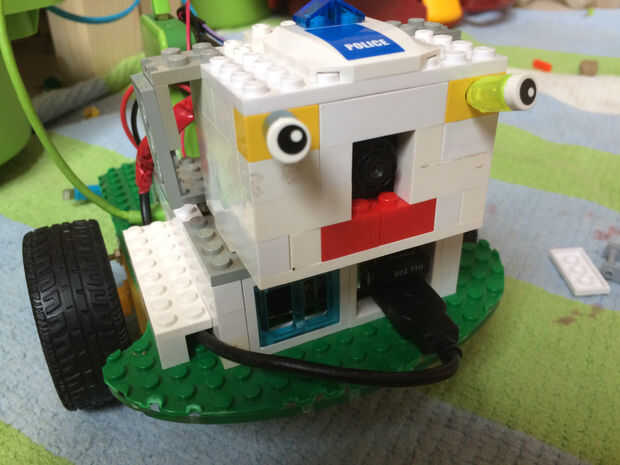
Paso 14: Montaje de la cabeza
Su tiempo para todo lo relacionado.
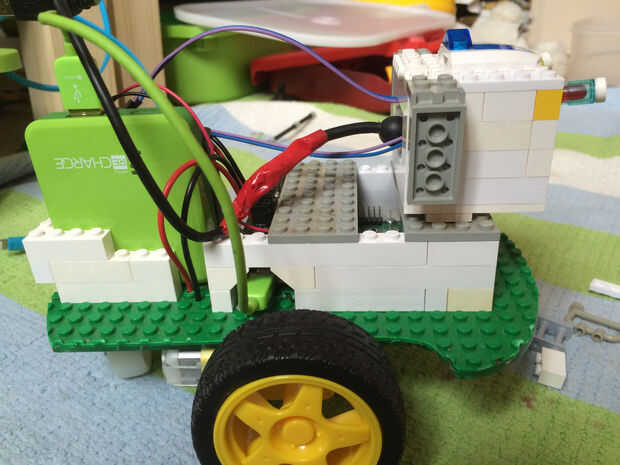
Conecte el cable USB Webcams al frente del bot, utilizando los orificios de acceso que creaste. Usted puede asegurar el alambre para el robot mediante la creación de algunas viviendas de Lego. También acortó el cable USB por el corte y volver a soldarlo, pero hacerlo sólo si realmente tienes ganas de soldar 4 minúsculos cables entre sí. Podría ser más fácil comprar un corto cable USB y conectarlo a la parte posterior de la cámara.
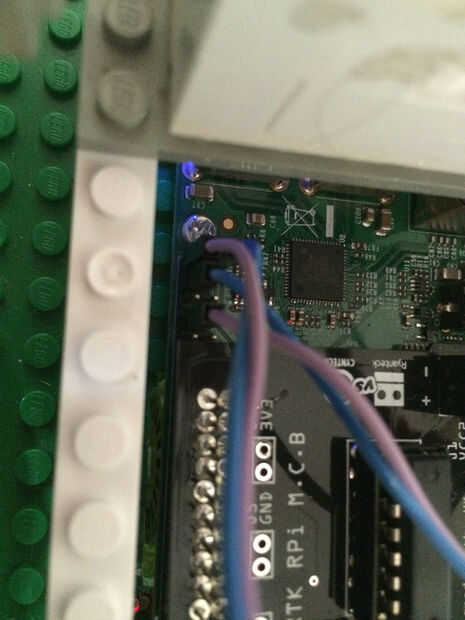
También se necesita conectar las luces a los pines GPIO de Pis no tomadas por el controlador de la tarjeta de motor. Estos son los pines GPIO 20 y 21 y los dos pasadores de repuesto tierra cerca. Utilice los pernos de repuesto tierra cerca. Si la luz no funciona entonces intente cambiar todo terreno con la salida GPIO. PARA qué pins para conectar a google un buen Diagrama GPIO.

 con Video Stream en vivo!!")










