Caso
Problema
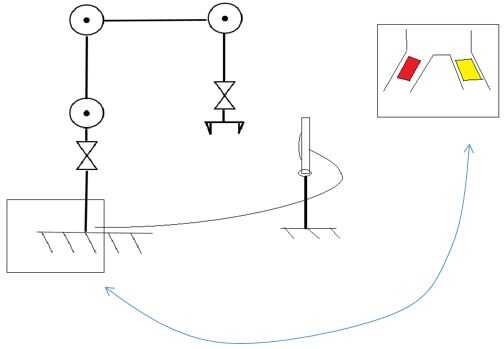
El robot va a clasificar 2 tipos diferentes de cajas (amarillo y rojo). El punto de entrega va a tener dos líneas, una amarilla y una roja. Aquí las cajas tienen que descartarse y también tienen que emparejar el color de la caja con el color de la línea.
Solución
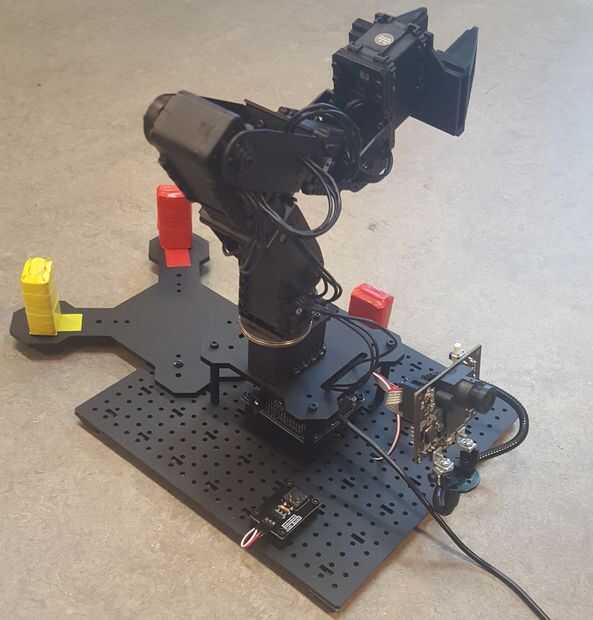
Para solucionar este problema, el grupo se va a utilizar una cámara de Pixy, CMUcam5 y un brazo de Robot de PhantomX Pincher. El brazo del robot se va a tomar el cuadro de color y colocar en el frente de la cámara. La cámara de Pixy se va a ver qué color tienen de la caja y enviar la información a la placa Arduino. Cuando la información se envía, el brazo del robot moverá ese cuadro en la línea de color que empareja.













