Paso 3: Marco/transmisión
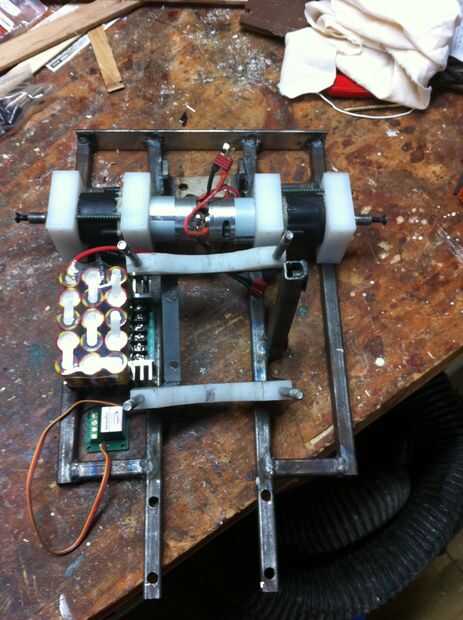
Primero hice parte de la estructura que sostendría todo. Mi material preferido es la 1/2 "X 1/2" caja de acero que venden en Home Depot. Después de la soldadura, la forma básica de que nuevo probar montar las piezas y trabajado en volver a disponerlos hacer todo ajuste.
La transmisión de Phoenix, como se describió anteriormente dos de Puerto de carga de 18 voltios taladro motores con ruedas de 4", montajes de ejes/motor de kitbots.com un taladro de baterías para energía. Me decidí por esta transmisión ya que ofrece suficiente velocidad y poder para el robot y era barato. El regulador de velocidad usé fue una Sabertooth 2 X 25 que había ganado en un concurso anterior.
Entonces hice un montaje de prueba del robot y luego pruebe...
Que denostado un descuido de diseño más importantes de mi parte. No hubo ningún peso sobre las ruedas que hace casi imposible manejar el robot. Que necesitaba para cambiar eso... con acero más...
Terminé 4 libras de acero en la parte delantera del bastidor para ayudar a contrarrestar los problemas de distribución de peso de la soldadura. El bono era ahora tenía armadura de acero espesor 1/8" en la parte delantera.













