Paso 2: Soldar los cables y condensadores para motores

Tira de aproximadamente 1/4 de pulgada de aislamiento de un extremo de cada cable. Tuerza los extremos del trenzado de cada alambre en un espiral apretado, esto evitará que los hilos del cable se deshilache mientras trabaja con ellos.
(Opcional) Te recomiendo que lata cada extremo del cable con el soldador. Esto hace de soldadura a los motores más fácil. Asegúrese de no usar demasiada soldadura, o resultará difícil insertar el cable en las lengüetas de la soldadura en el motor.
(Opcional) Si usted utiliza cables de diferente color, ahora sería un buen momento para probar sus motores con el paquete de baterías. Introduzca las 3 pilas AAA en el soporte de la batería y cierre la tapa. Alinee los motores lo que serán necesario para el robot, con un eje sobresale a cada lado, como se muestra en la primera foto. Cuidadosamente toque el cable rojo del portapilas a un contacto de motor y el cable negro al otro contacto motor y ver que el motor gira. Desea identificar de qué manera hará que ambos motores giro para mover el robot hacia adelante. Porque un motor se enfrenta a izquierda y derecha, los motores tienen que girar en direcciones opuestas para mover el robot hacia adelante. Tomar buena nota de que los contactos al uso, elegir un color para representar el voltaje positivo y al otro cable de color para representar a tierra (0 voltios).
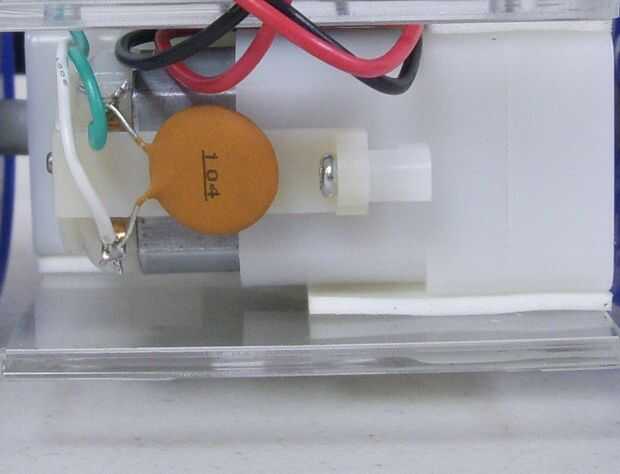
Introduzca cuidadosamente los dos alambres en los contactos del motor de un motor. Luego se extienden los cables de un 0.1uF condensador e inserte uno plomo en cada uno de los contactos del motor. Asegúrese de que uno de los cables todavía se inserta en cada contacto y soldarlos en el lugar.
Repetir la soldadura para el otro motor. Cuando haya terminado, debería ver algo parecido a lo que se ve en la segunda foto.








")




