Paso 4: Código de Proyecto Final
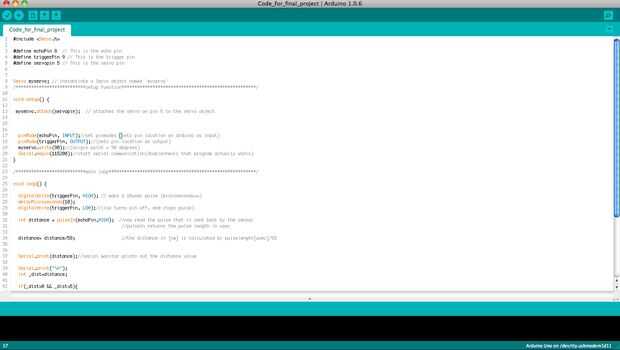
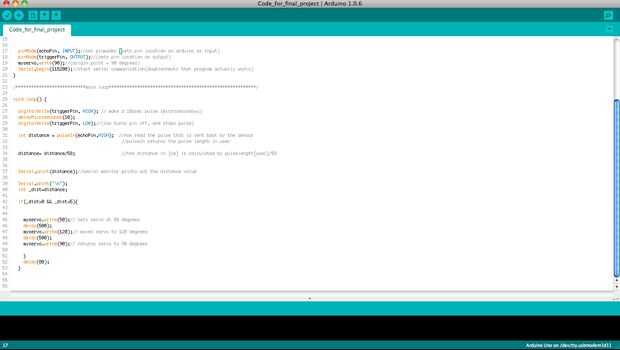
A continuación en el proceso de es escribir el código para el proyecto para que los componentes pueden comunicarse entre sí y saber cuando mover. Por ejemplo en mi proyecto sin ciertos pedazos del código, el sensor de proximidad se detecta un objeto delante de él pero no se comunicó con el servo que el pie permanezca todavía y no pivote hacia delante golpeando el balón. El código en su totalidad puede verse en las fotos anteriores, pero se señalan algunas de las partes importantes del código. Lo primero que hice al escribir mi código era incluyendo el archivo de encabezado para el Servo para que no tendría que reescribir parte del código. Luego definí todas mis variables (eco servos y desencadenador pin), así como de instancias de mi servo. La myservo.write(90) de la línea, significa que el punto de origen para el servo es noventa grados. También "alta" al discutir las clavijas del sensor de proximidad significa que es el pin, y "baja" significa que el pin es apagado. La última parte del código, con las líneas myservo.write, los valores se refieren a ángulos de números no regulares. Tan su diciendo que si el sensor de proximidad detecta un objeto, el ping pong bola, cero a cinco centimers, entonces él dirá el servo para girar el pie a 120 grados y pivote hacia delante hasta cincuenta y luego cuando el objeto no es había detectado pivote a noventa grados.





 instrucciones")







