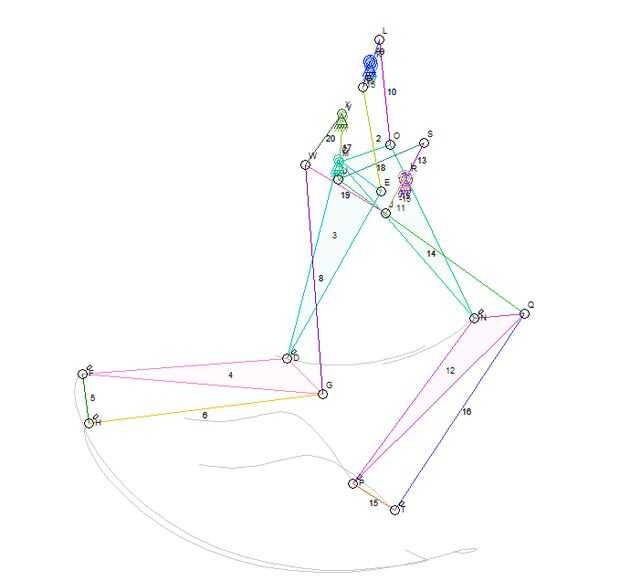
Pareció hacer unas piernas de robot, pero realmente no tienen acceso a equipos o instalaciones para ello pero se tropezó con un programa llamado linkage2 en Internet y decidió iniciarse en el diseño de algunos.
Igual yo no comenzar con unos bocetos y unas horas en el taller. Como resulta que todas las dimensiones adecuadas para hacer las patas hagan exactamente lo que quieres es muy, muy difícil. Me detuve después de 16 importantes diseño cambio de que había cientos de pequeños cambios incrementales en el camino.
IF y es un gran si, trataba de ir más lejos sería hora de empezar a hacer algunas pruebas reales...
Estos fueron mis objetivos:-
- Las piernas serían propulsadas por un motor giratorio y servos ni cilindros de accionamiento. El razonamiento aquí fue que los servos y los cilindros de accionamiento tienen que parar y seguir avanzando comienzo en sentido contrario simplemente para hacer las patas. Esto es más masivo pasando por cambios de dirección y esperaba que un impulsor giratorio constante sería capaz de tener menos masas cambios incluso con barras de control.
- Viajarían a las piernas en el suelo en un plano horizontal para que el cuerpo robot no suben y bajan como caminar y correr.
- El tiempo de una pierna fue a ser el 50% de la caminata ciclo así que no había ningún rayado de la segunda etapa o no hay tiempo cuando ambas piernas se levantaron (parcialmente). Porque la pierna que no apoya el robot tiene que levantarse para despejar el terreno tiene que viajar más lejos y más rápido en la vuelta para posicionarse para el siguiente paso.
La marcha se podía cambiar de pie a caminar a correr cambiando la longitud de la barra de control o posiciones. Podría mantenerse el motor impulsor crucial para permitir que la velocidad del robot para ser determinado por el tamaño de paso/paso y también por la velocidad del motor. Usted no puede verlo en los videos pero hay controles en el modelo que permiten estas cosas para cambiar como se pasa a través de su ciclo.
Estaba bastante contento con el resultado y en los enlaces de vídeo de dos de las soluciones en el siguiente paso. La primera de ellas muestra dos patas que normalmente sería al lado pero me he mudado un avance para hacer más fácil ver cómo trabajan juntos. En otros diseños he probado poner un 'pie' en el extremo articular de una manera para ayudar en la absorción de choque como el pie cae y ayudar a que distancia.
El segundo video muestra otro diseño con las piernas de lado a lado y se puede ver no hay tiempo cuando las piernas están viajando horizontalmente para que el robot se rebote como funcionó. Esto puede ser una buena cosa en la práctica y que es donde algunas pruebas del mundo real.
Un largo camino por recorrer antes de DARPA o Asimo tiene que preocuparse, pero un intelectual agradable ejercicio de las mismas.











 (impresión 3D)")

