El sensor ultrasónico emite pulsos a una frecuencia de 40KHz (imperceptible para el oído humano y los animales), estos pulsos al golpear un objeto, se reflejan y regresan al sensor después de cierto tiempo; conocer el tiempo total de alrededor de las muñecas y la velocidad del sonido en el medio (el aire), es fácil calcular la distancia recorrida por las muñecas y así determinar la distancia del objeto en relación con el sensor.
Ver el post sobre sensor PING para obtener más información en
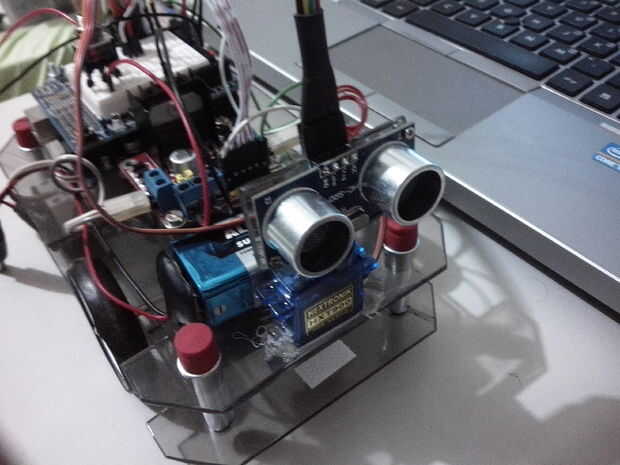
Vamos a utilizar el mismo chasis de la BUGBot... pero en la actualidad con un puente H dual / L298H para el control de dos motores de CC (control de dirección y velocidad), que darán una mayor flexibilidad a nuestro prototipo.
El funcionamiento básico es como sigue:
Cuando arrancar el robot seguirá detenido, el sensor calcula la distancia frontal, derecha e izquierda, comparará estos distancia con una distancia de umbral (i.e.20 cm) así que puede decidir cual es la mejor manera de avanzar (el camino más largo siempre será la mejor opción!).
Después de que el Robot comienza a correr hacia adelante hasta el momento van a encontrar un objeto que interfiera con su avance (debe acercarse el máximo hasta una distancia, en pulgadas, del objeto), cuando ocurre: se detiene y analizarla otra vez distancias: frente, derecha e izquierda, así que él podría decidir otra vez cual es la mejor manera de avanzar - volviendo otra vez a la operación ciclo.













