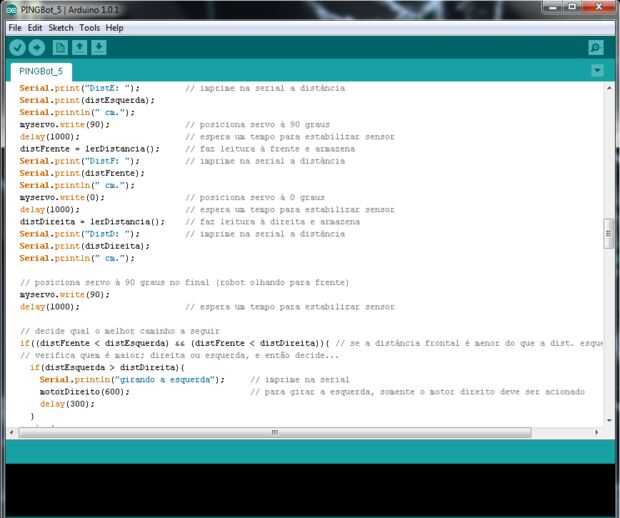
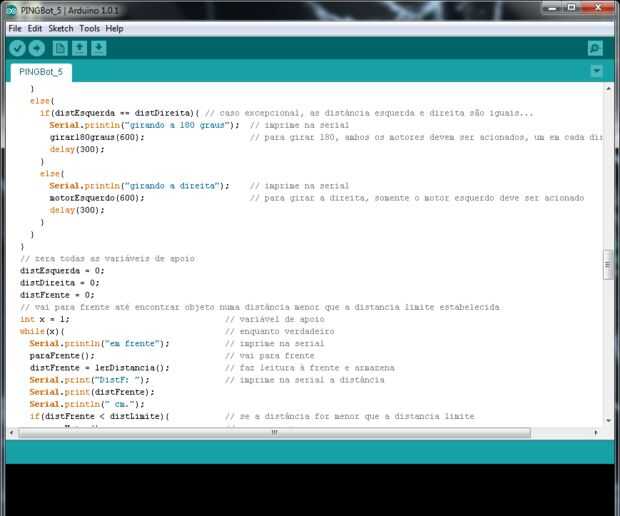
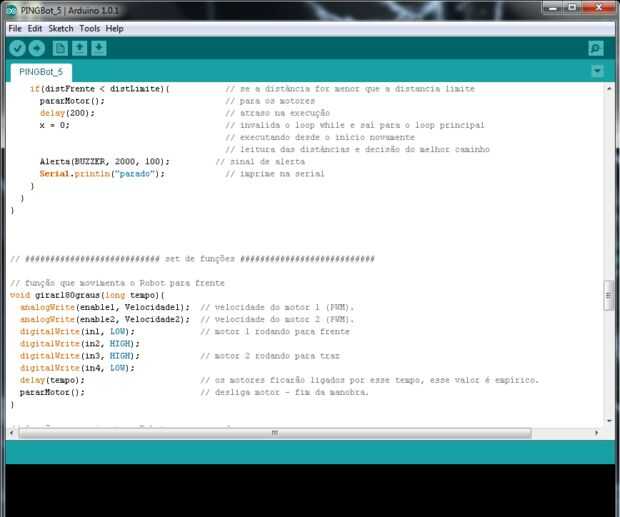
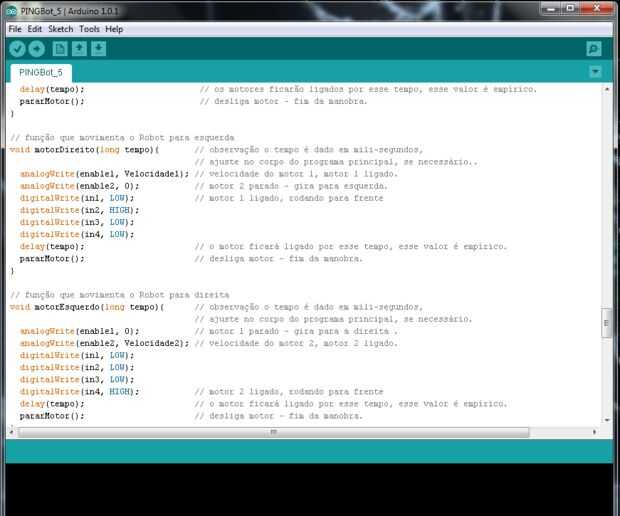
Paso 4: Software y programación
Muchas versiones se crearon en la fase inicial de construcción de la PINGBot.
Se creó una versión para administrar los motores de CC (dirección, velocidad, para girar a la izquierda, gire a la derecha y para giro de 180 grados).
Y también se crearon versión la continua rotación servo del motor. Si usted necesita esta versión, éntreme en contacto con por favor y estoy dispuesto a ayudar.
Yo tenía mucho trabajo por hacer los últimos ajustes en el Robot (y creo que no es demasiado bueno hasta ahora). Primero, porque los motores de la C.C. ruido como ya comentado y para los movimientos de ajuste y consumo de bateria.
Cerca de 30 horas transcurrieron en este proyecto. Creo que para cualquier tipo de chasis, necesitamos tiempo gastado para los ajustes y depuración.
Puede descargar los bosquejos de arduino y bibliotecas directamente en el GitHub a continuación:













