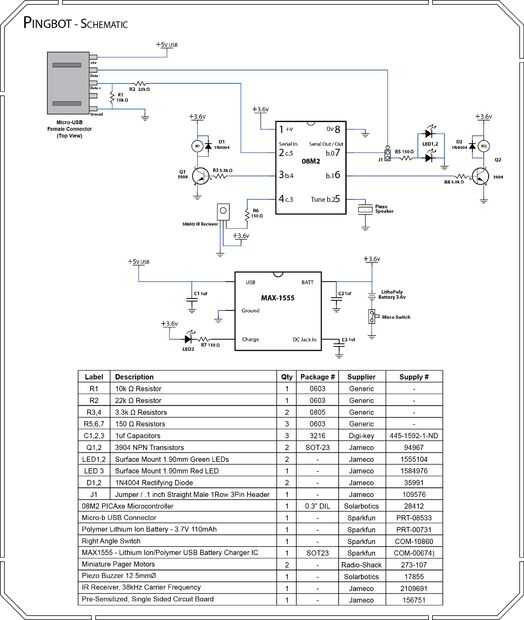
Paso 5: Circuito y esquema
Un microcontrolador PICAXE M 2 08 sirve como una mente para la Pingbot. Este chip es muy fácil programar automáticamente entiende universal controles remoto de TV, es barato y tiene la capacidad para reproducir música con el comando tune! Encima de todo lo que se dispone de una cantidad increíblemente grande de documentación y las instrucciones directamente desde la web PICAXE.
Una vez que se suelda en circuito el 08M 2 puede ser reprogramado con un puerto USB, el cable del convertidor serial AXE027 y un cable micro-USB; el chip no necesita ser eliminado de la PCB. Esto hace sencillo cambiar el comportamiento del robot y experimentar con diferentes comandos.
Control remoto
Lo 08M 2 utiliza un receptor IR de 38Mhz para decodificar hasta 17 comandos desde un remoto universal de la televisión. Usted puede comprar el IR receptor en línea, o usted puede buscar uno de un aparato viejo. Prácticamente todos los mayores reproductores de DVD y VCR se hicieron con uno de estos receptores.
Fuente de alimentación y recarga
El robot es alimentado por batería de polímero de litio (LiPo). Un MAX-1555 IC se utiliza para cargar la batería mediante el mismo cable micro-USB para programación. Cuando el cable está enchufado en el robot, el 1555 se conecta al USB de Puerto + 5V pin y carga la batería de LiPo. Un micro interruptor conecta las baterías de tierra al circuito; la batería no se carga mientras está apagado. Mientras que carga el 1555 se enciende el LED rojo y luego lo apaga cuando la batería está llena.
Baterías LiPo son muy ligeras y mantener mucha energía para su tamaño así lo que es ideal para pequeños robots y juguetes del RC. Sin embargo, si carga incorrectamente, las baterías de polímero de litio pueden ser peligrosas! Debe tener un cargador diseñado para baterías de litio. Usando una ni-CD o NiMH para cargar una batería de litio-poly es muy malo y puede resultar en fuego explosivo! La batería y carga IC utilizado en el proyecto se hacen para trabajar juntos. Si usted quiere experimentar con otras baterías de Lito-poli, por favor hacer tu investigación primero!
Locomoción
Dos motores pager pequeñas se montan a través de la placa de circuito de tal manera que sus ejes tocan el suelo y ruedas para el robot. Son controlados por los transistores de NPN de 08 M 2 y dos 3904. Estos transistores reciben señales de la 08MX y actúan como interruptores para los motores, encendiendo y apagando los. Un diodo se utiliza a través de cables de los motores para proteger contra voltaje reverso. Para obtener más información acerca de cómo este funciona revisa este tutorial con detalles sobre éste y otros métodos útiles de control del motor pequeño.
Estos tipos de motores de vibración están disponibles en línea. Mientras que compras deben tratar de encontrar a los que no tienen los extremos cargados que hacen que el motor vibre, esas cosas pueden ser un dolor enorme para despegar. La mejor forma que he encontrado para eliminarlos ha sido utilizar un eje de tamaño similar de un motor disecado. Con un par de pinzas, agarro el peso añadido al motor para el robot. Luego con otro par de pinzas, yo empuje el eje extra en el orificio en la parte superior del primer peso. Con un poco de fuerza el motor del eje generalmente diapositivas hacia fuera.
Personalidad - luces y música
La personalidad es una gran manera para que tu robot sienta como más que un lío de componentes y lo 08M 2 comando tune es perfecto para dar un robot un poco de carisma. Con él puede jugar viejos tonos de teléfono móvil a través de un altavoz peizo y tiene un parpadeo de LED junto con la música. Para hacer uso de esta función el circuito incluye un altavoz piezoeléctrico de 12mm y dos pequeños LEDs. Lleva exceso de trabajo de soldadura anterior se utiliza para fijar los LEDs a la placa de circuito que puede estar doblados en la posición detrás de los ojos de la lente de CD.
Esquema
Estos circuitos se encuentran en los manuales con muy poca modificación y hojas de datos de MAX-1555 y 08 M 2 .







")



")

