Paso 2: 2ª ronda!

Después ajuste el código y cambiar a un más de gran alcance láser decidí darle otra oportunidad. Apague las luces y deje el papel de la cámara.
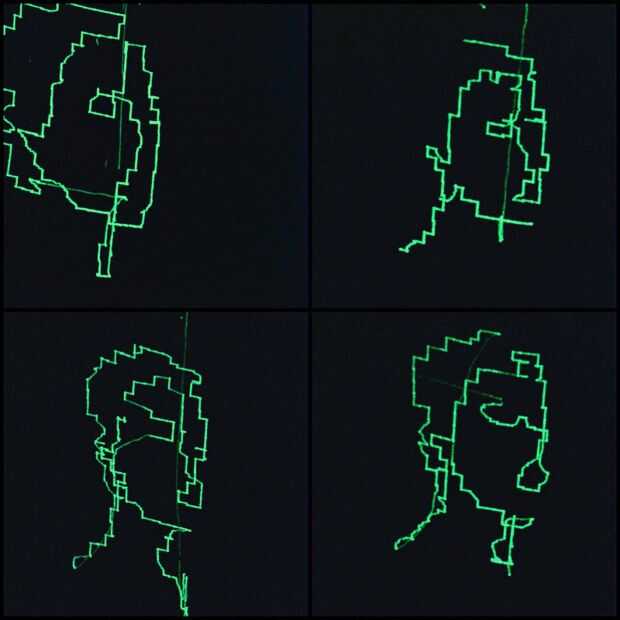
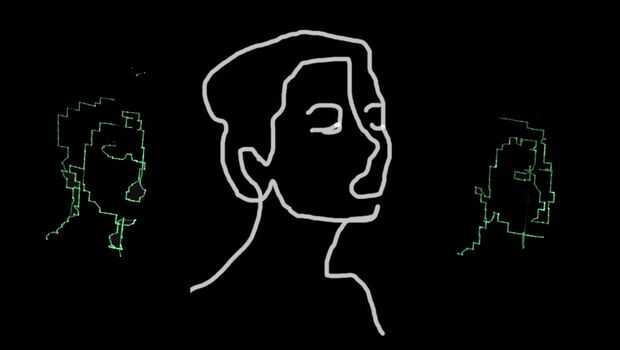
Como pueden ver hubo progresos significativos. Sin embargo, el principal problema es la falta de resolución se pueden obtener utilizando servos stander con el servo.h de arduino. Otro problema me encuentro fue el el hecho de que la configuración entera fue bastante lenta y si he intentado ir más rápido los servos iba loco...













