Paso 5: Conectar múltiples servos usando I2C a un Arduino
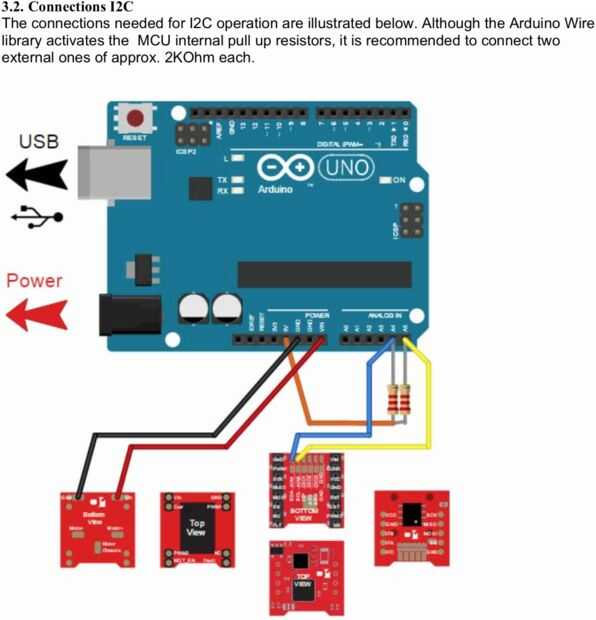
El I2C protocolo es impresionante en muchos sentidos, como la forma en que se podría conectar conectar más de 100 dispositivos a los mismos pines de Arduino 2 y controlarlos todos independientemente y al mismo tiempo. Estos dispositivos pueden ser sensores, los motores (en este caso), incluso otros arduinos. Esto sin embargo no viene con sus dificultades. Puesto que todos los dispositivos están siendo controlados por los pasadores de la misma tiene que haber una manera de hacerles frente. Por defecto los controladores SMS cuentan con la dirección n º 4. Esto se convierte en un problema al tratar de controlar a más de uno ya que interfieren uno con el otro.
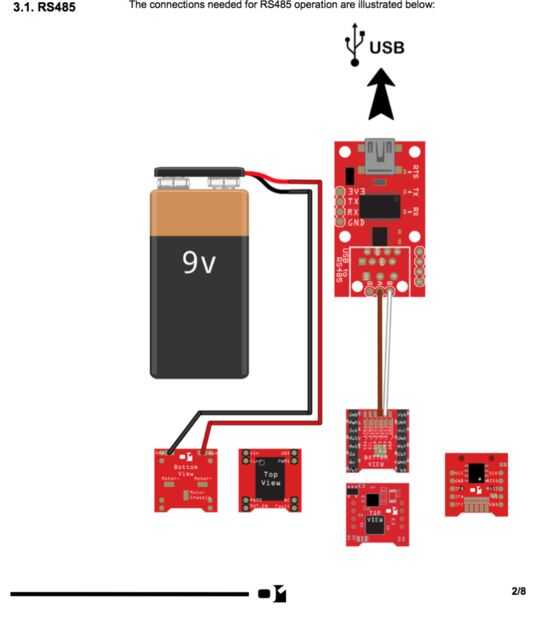
Cambiar la dirección del servo:
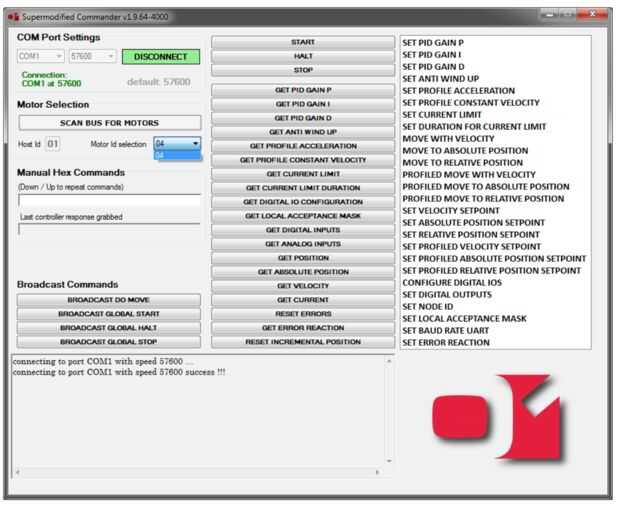
Para cambiar la dirección del servo necesita algún hardware adicional. El RS-485 a USB permite el controlador conectar al ordenador. Usted también necesitará descargar el comandante Supermodified 01. Esto le permitirá conectar al controlador de servo, probarlo y modificarlo. Asegúrese de seguir a la guía (se adjunta). Los chicos de 01 Mecatrónica han hecho un excelente trabajo en este proceso la documentación y la guía es fácil de seguir.
Después de ver el controlador Seleccione función No23 en el lado derecho del software SET nodo ID. Se le pedirá para seleccionar otro nodo id (identificador de motor) para el controlador SMS.













