Paso 6: Poner todo junto




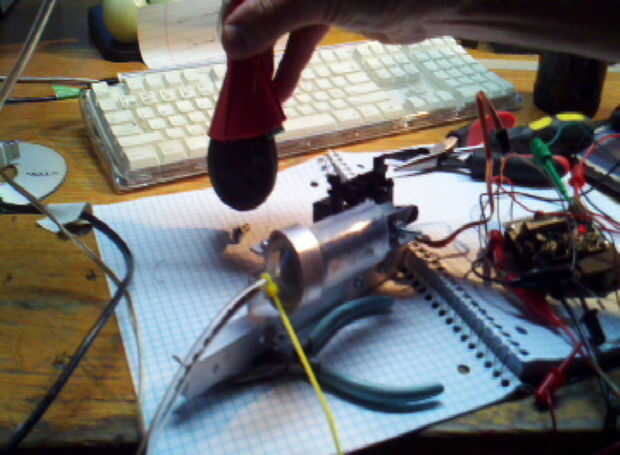
Había probado la jeringa y que sólo debían tirar el émbolo 30ml para conseguir un buen vacío. Usé una sierra para metales para cortar el barril de la jeringa.
También corté el émbolo de unos 3cm más largo que el cañón.
Perforé un asimiento en el brazo del servo y el émbolo. Un tornillo #6 con arandelas y tuercas tiene el émbolo muy estable como el servo tira atrás y empuja hacia adelante.
Tuve algunos canal U de aluminio y corte una pieza de 20 cm de largo. No sé el nombre técnico, pero tuve una pieza plástica que se utiliza para montar los servos que tengo en una caja de servos de eBay. He conectado el servo a la montura de plástico y luego atornillar el Monte a la U canal de aluminio.
Un pedazo de barra aluminio plana hecho la jeringa de la ayuda. El apoyo tiene que rotar cuando el émbolo se mueve, así que puse un #6 Tornillo para sujetar el cañón y otro tornillo en el canal U. El perno de canal de U no fue ajustado para que todo el conjunto puede girar.
Los cables desde el sensor de presión van a Arduino. Utilicé la misma configuración en cuanto a un fotoresistor en la página de Arduino.
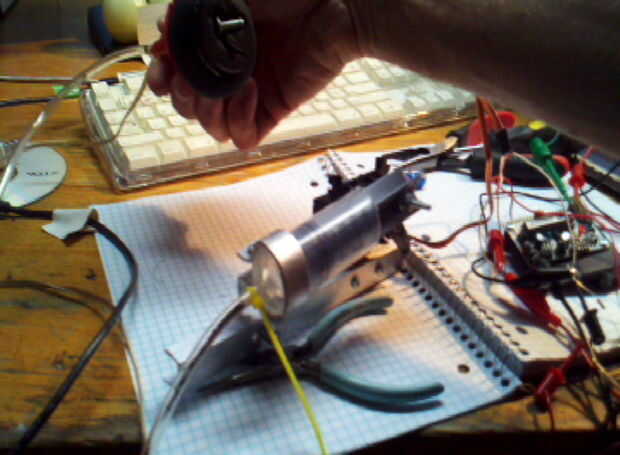
Código lee el sensor de presión, y cuando se aplica suficiente presión se activa el servo. El Arduino espera 2 segundos y luego empuja el émbolo hacia atrás en el barril que quitar el vacío.
No tengo un brazo de robot (todavía), pero esto podría ser realmente divertido hacer uno. Su fuerza es que puede coger objetos muy irregular o lisos fácilmente. Usando la jeringa, no hay necesidad de bombas de vacío o depósitos de vacío. El sistema parece bastante robusta y fiable.
Déjeme saber si usted experimenta y llegar a mejoras!

 con")

")

 gratis con viejas partes")







