Paso 1: Hardware

Cada sensor tiene tres pernos. Los pasadores son fuente de +8.5 voltios, solo cable comm de dúplex medio y tierra. En un vehículo, el módulo UPA proporciona el suministro de 8,5 voltios regulada a los sensores. La UPA es capaz de encender este suministro y apagado, en la voluntad. Por ejemplo, mientras viaja por la autopista los sensores están desconectados. Cuando el vehículo se desacelera por debajo de cierto umbral de velocidad mágica los sensores se encienden nuevamente.
El comm de alambre entre el módulo UPA y el sensor parece un poco extraño para mí. Cuando esté inactivo el autobús está inactivo ocho voltios. De una manera un poco de colector abierto, el módulo UPA y el sensor comunican mediante impulsos que tiran el autobús baja para pulsos cortos. Lo extraño es que la UPA envía comandos digitales para el sensor y el sensor responde con una onda digital que parece el echo real o bits digitales normales. Depende del comando. Para la respuesta de echo es como si sólo tomaron la analógica derecha el elemento piezo, funcionó a través de un comparador op-amp y envió el op-amp salida hacia fuera en el cable comm. Es extraño y pulido al mismo tiempo. Desventaja es que el micro tiene que utilizar un temporizador rápido para medir todos los pulsos de eco. No simple acción UART para recibir una respuesta de eco.
Después de encender, la UPA envía un montón de datos en el sensor. Supongo que el primer conjunto de pulsos inicializar el sensor con un cierto nivel de ganancia. Supongo que cada tipo diferente de vehículo tiene una cadena de inicialización diferentes de pulsos de datos. Parece que la UPA envía un par de comandos de reset en el sensor. Por supuesto, hay un reconocimiento desde el sensor. Por último, una secuencia de escaneo de sensor comienza en la UPA donde uno de los sensores se manda a ping mientras uno o dos sensores simultáneamente se manda a escuchar solamente. Usando un sensor para hacer ping y uno o dos sensores escuchar permite que objetos muy cercanos a ser detectado. Todos los resultados de los sensores son succionados por el micro en la UPA. Tenga en cuenta que el micro Star12 en la UPA puede capturar temporizador valores basados en pulsos vienen en. Hay ocho clavijas en el Star12 que tienen esta capacidad. Así, un pulso activa el Start12 para capturar al temporizador automáticamente, a la vez que una bandera de interrupción se establece para eso perno. En la rutina de interrupción la micro neutraliza el valor capturado, borra la bandera de interrupción y devuelve. Lo cool es que valor del temporizador capturados se realiza en hardware justo cuando sucede el gatillo. Por lo tanto, incluso si hay variación en la respuesta de la interrupción, no importa porque el contador ya había sido capturado. Motorola realmente sabe cómo diseñar micros automotrices. OK, lo admito, como un empleado de Motorola X tengo todavía un punto blando para Moto antigua. Nota, Motorola vendió la división micro de Freescale algunos 6 / 8 años. Motorola también ha vendido mi antigua división automotriz.
¿Usted cómo Motorola consiguió su nombre? Bueno, hace 100 años una Vitrola había jugado registros. Así, Motorola tiene su nombre poniendo una Victrola (no una Vitrola real pero solo la idea de un disco) en un vehículo de Motor. Motor coche + Victrola = coche Motorola Radio. Motorola tiene su inicio con la fabricación de radios automotrices. Ahora, Motorola está totalmente fuera de la empresa automotriz. Me da pena. De todos modos, un poco de trivia.
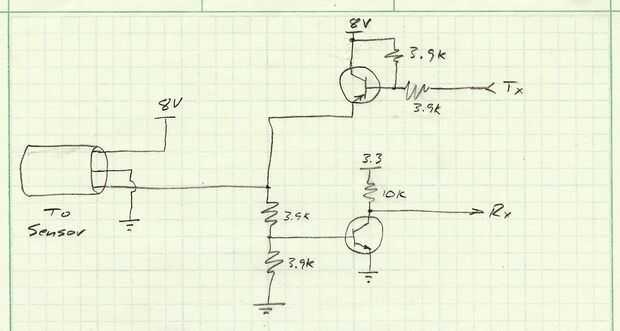
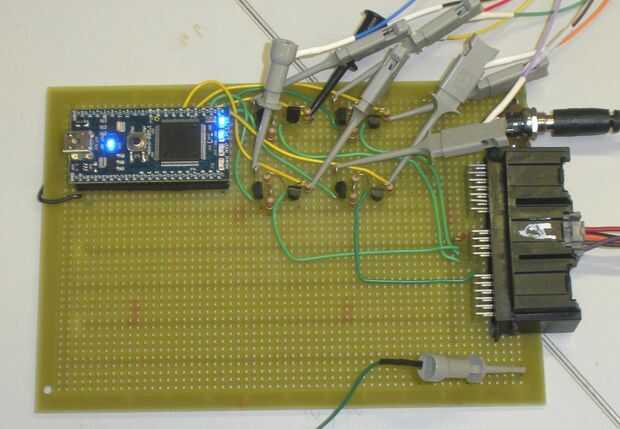
Volver a la configuración del hardware. La Junta de desarrollo que se muestra a continuación construí interfaces cuatro sensores a un micro de desarrollo mbed para. Cada sensor debe tener un circuito buffer para convertir los voltajes del bus hasta los 3,3 v valores TTL que emplea el mbed para micro. Se puede pensar el autobús de sensor como un bus de comunicaciones dúplex medio. Parece que las comunicaciones en el bus son serie 9600 baudios. Al menos que mi LSA (analizador de estado lógico) puede decodificar los impulsos si establece en 9600 baudios.
Simplemente usé pernos P21 por P28 en el mbed para interfaz a los cuatro sensores en mi tablero de desarrollo. El mbed para parece ser aún mejor en el tratamiento de trenes de pulso que el Star12. Tiene todas las campanas y silbidos que el Star12, y mucho más.













")