Paso 3: Descifrar los resultados
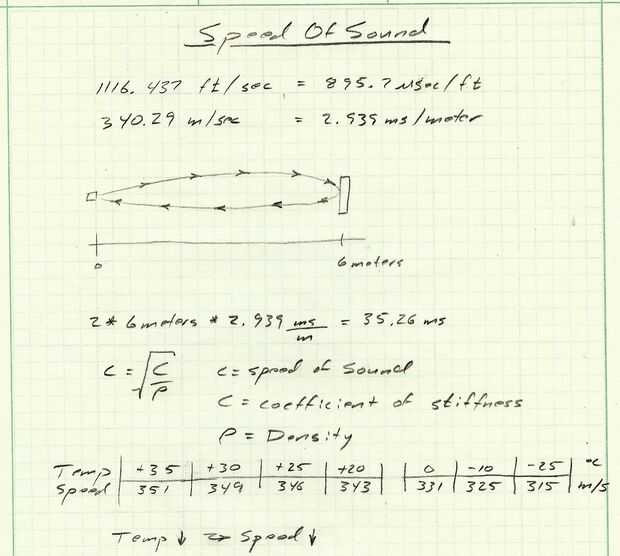
Hice algunas notas de la página de Wikipedia que tenían que ver con la velocidad del sonido. El hecho notable es que el sonido tarda aproximadamente 900us (microsegundos) a un pie de viaje. Se trata de aire seco a presión estándar (nivel del mar) y temperatura estándar (25 grados C). Como la temperatura desciende la velocidad del sonido disminuye demasiado. Esto significa tiempo para viajar que sube un pie. Si la temperatura se reduce a-25 grados C tendrá un extra 72 microsegundos para el sonido cubrir ese mismo pie! Impactante, yo sé.
OK, permite resolver algunos espera de la sincronización. A pesar de que los sensores están diseñados sólo para alcanzar dos metros permite plan en tres para estar seguro. Quien sabe, tal vez habrá algún objeto de gran monstruo que puede recuperarse energía ultrasónica de tres metros.
Si queremos dosificar a un máximo de tres metros, entonces el sonido va realmente a viajar tres metros hacia fuera, rebotan en algún objeto grande y luego viajar tres metros hacia atrás. Viaje redondo es de seis metros. Bien, sonido viajes en microsegundos 2939 / metro. Por lo tanto, podemos esperar 6 metros tomar 17,634 milisegundos. Permite redondo hasta un buen número de entero de 18ms.
Ahora, ya que estamos golpeando el ambiente con cosas extrañas de la energía ultrasónica puede suceder. Nuestro ping realmente podría viajar fuera aún más y golpear algún reflector super (volquetes de basura son un reflector impresionante) y recuperarse. Si empezamos inmediatamente otro ping podemos obtener una mezcla falsa de ping actual con el anterior ping que tomó el camino largo a casa. Mal. Para evitar esto, mejor agregar una detención de tiempo, o protector de la banda, entre cada ping. Permite añadir otro 18ms entorno a ultrasonidos paró después nuestro ping.
Debido a ruido espúreo en el medio ambiente es mejor doble verificar objetos en lugar de depender de un solo ping. Hay un montón de basura en el ambiente la genera energía ultrasónica. Por lo tanto, ping el objeto una segunda vez para verificar su ubicación. Las probabilidades de que una fuente de ruido está viendo a la misma distancia exacta son delgadas.
Por lo tanto, detección del objeto es del tipo: banda de la guardia, segundo ping, ping, segunda guardia-banda.
Gran total, entonces, para declarar un objeto como "real" es dos pings con dos bandas de guardia (18ms * 4) es igual a 72ms. Esto es peor caso sincronización (más robusto). Tenga en cuenta que simultáneamente también podemos recoger los ecos desde sensor escucha sin sanción alguna vez. Sin embargo, la geometría entre el sensor ping y escucha debe explicarse para determinar la distancia real al objeto.
Ya que tenemos total control sobre los sensores podemos programarlos para cualquier otro momento que deseamos. Nunca he probado esto, pero, qué tal hacer ping a todos los sensores al mismo tiempo! Bang! Hablar de golpear el ambiente con energía ultrasónica.
====================
Bueno, eso está sobre él. Tengo un montón más información en mi sitio web sobre el módulo UPA y el sistema de ingeniería inversa. Si su interesado echa un vistazo:
Gracias,
Jim













")