Paso 5: Baterías
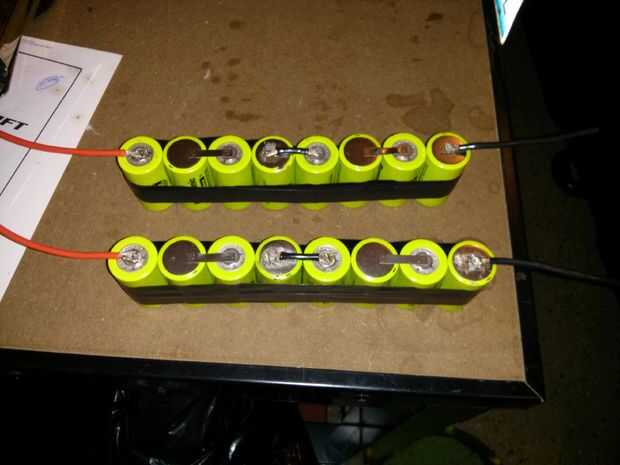

Quería que este robot tiene un montón de energía de la batería porque no lo quiero a morir en mí cuando estaba arriba en el techo. También necesito las baterías a ser delgado y largo por lo que encajaría en ambos lados del robot. Así que opté por hacer mis propios paquetes de la batería. He usado pilas de NiCad estilo C 1.2v y 3Ah y conexión 8 de ellos en serie para darme 9.6v 3Ah cada uno y con 2 paquetes tendría 6Ah definitivamente overkill pero entonces otra vez así que esta todo el proyecto. También hice un 4.8v batería para ejecutar las juntas y se puede ver instalado en el robot más adelante.
Me alinearon las pilas y soldar un cable o una ficha de soldadura a cada una de las baterías que se conecta a la siguiente. En los extremos había soldado mis cables positivos y negativos. Luego tomó del encogimiento del calor y había reducido el paquete entero. Este paso es fundamental porque no desea que las pilas en cortocircuito para que cada conexión debe ser cubierto.
Más tarde os adjunto conectores sobre mí mismo que lo hice en todo el hardware. Esto es así puedo desconectar todo y cambiar piezas o cargue las baterías cuando sea necesario.

 Básicos Arduino Robot buscador de luz!")










