Paso 6: electrónica
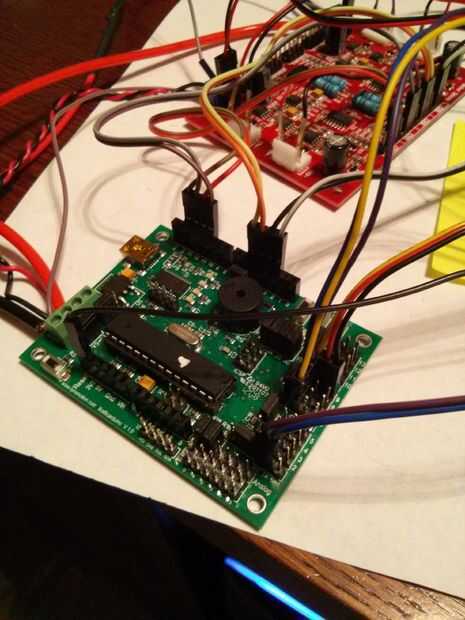
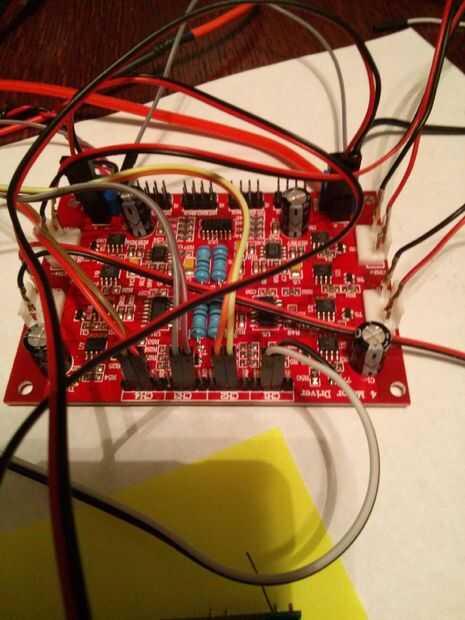
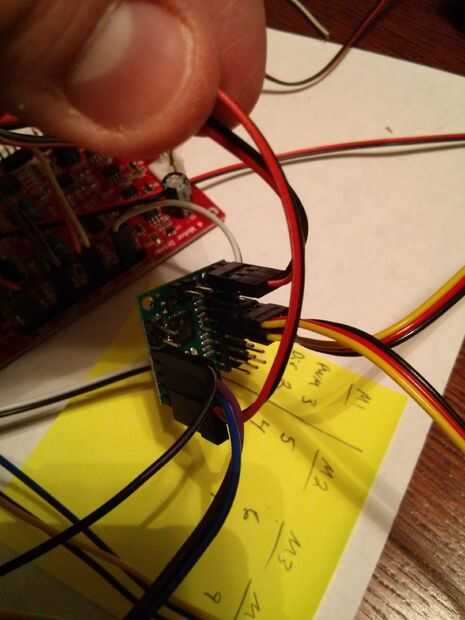


Este fue el primer proyecto que he utilizado Arduino asi he don un poco de investigación. Decidí usar el Arduino Botboarduino de Lynxmotion para el procesador porque se ha utilizado en un vehículo de la impulsión de 4 ruedas antes. Entonces tuve que buscar un regulador del motor de 4 canales, que no encuentro demasiados para elegir. Podría tener uso 2 de los controladores de 2 canal pero he querido todo en una tabla. Así que fui con el regulador del motor de canal 4 de Dagu de Robotshop. Ejecutar sólo los motores de 4 y el receptor remoto utiliza todos mis canales servo en el Botboarduino así que tuve que conseguir un chip controlador de micro servo serie podría tener más canales para mi servos que controlarán mi cámara frontal y posiblemente un brazo de agarre.
Quería utilizar un controlador de PlayStation 2 para esta construcción debido a los botones principales son perfectos para mi rotación en sentido horario y antihorario de las pistas. Así que compré el Lynxmotion PS2 controlador V3 de Robotshop.
Tengo un interruptor que tiene dos circuitos en un interruptor así podría correr 9.6v en un lado y 4.8v en el otro lado.
También tengo 4 servos que se utilizará. Dos para el Pan y Tilt de la cámara frontal y dos para la pizca y la inclinación de la pinza del brazo pero le demostraré ésos más adelante.

 Básicos Arduino Robot buscador de luz!")










