Paso 4: Programación y Control
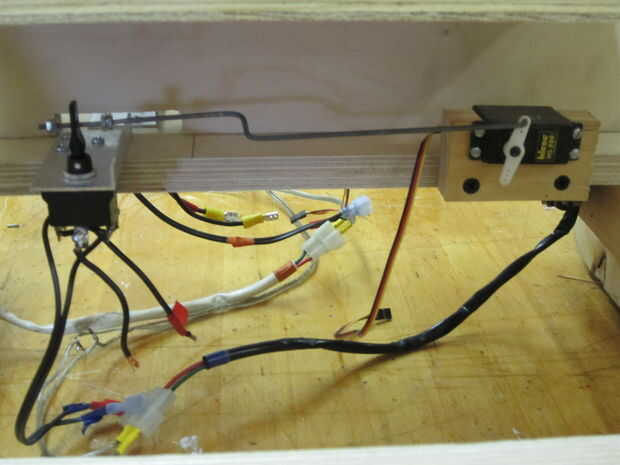


Todos los cables están conectados al interruptor que está conectado a una barra de aluminio que está conectada a un servo.
Al mover el servo, el interruptor de una de las pistas conduce hacia adelante o hacia atrás
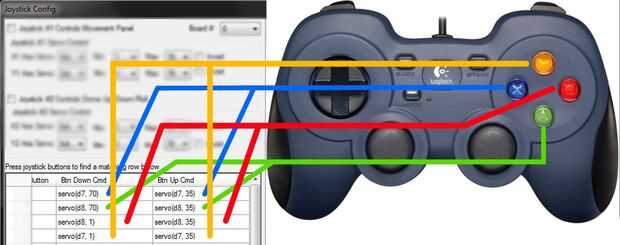
para la programación, utiliza un controlador de llamada el regulador E-Z Robot Bluetooth pero se puede utilizar cualquier controlador rc
Asigna puertos al controlador y ajustado (es software libre) de forma que al pulsar un botón, el servo se mueve a una cierta (en este caso, 90 * girar) y vuelve a su posición estable en el medio.













