Paso 1: Sistema de piezas se descomponen
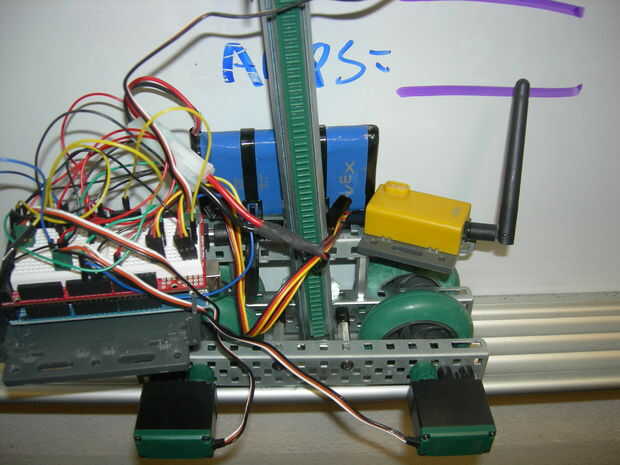
Arduino Mega
Arduino Mega Protoshield, con 2 mini breadboards y puentes
3 motores VEX
Adaptador de Bluetooth BlueSmirf (ubicado en el caso VEX amarillo con antena)
Visión RoboRealm Software
Reguladores lineales de VEX
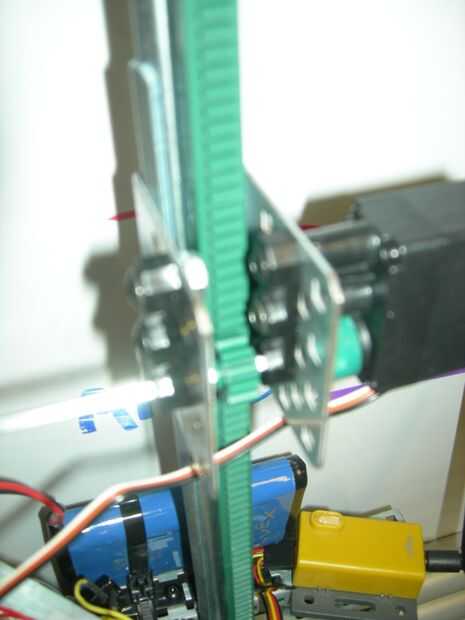
VEX piñón y engranajes
VEX 9.6V batería
4 ruedas pequeñas VEX
Vex metal, tornillos, etc..
Este proyecto se compone de dos secciones principales. La primera sección es el robot real. El robot en teoría es algo simple. Consiste en una base con dos ruedas que monta en una pista de pizarra. El diseño de la base permite al robot cubrir el eje entero de la pizarra. Para mover en el eje y, el robot utiliza deslizadores lineales para mover un brazo hacia arriba y hacia abajo. Atado al extremo del brazo es un borrador de seco que hace el borrado real.
No es difícil construir el robot. Sólo consta de 2 motores que conducen respectivamente 2 ruedas pequeñas de VEX.


")









")
