Paso 3: Microcontrolador Control
![]()
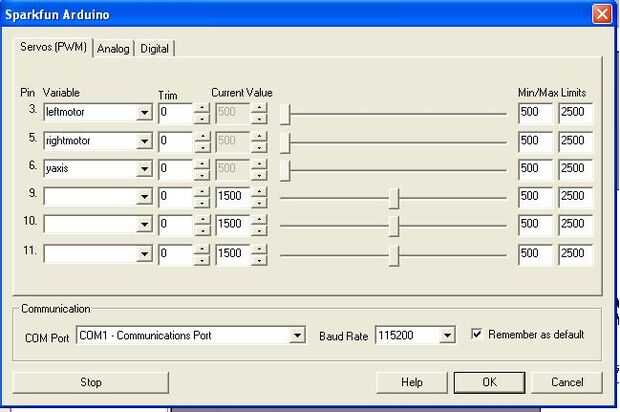
Una vez que el programa encuentra el centro de gravedad de la escritura en la pizarra, se convierte en un punto en un plano de coordenadas. Entonces usando matemáticas básicas, el programa dice el robot para mover a este punto utilizando comandos motor deriva del punto en el plano de coordenadas. Todas las matemáticas y los cálculos se realizan en el equipo y sólo el motor comandos son enviados al robot vía Bluetooth. Realizar los cálculos en el ordenador y no en el robot real hace que el sistema significativamente más rápido y más suave. En este caso el microcontrolador sólo actúa como una interfaz física. El único código que es cargado en el Arduino Mega es un código de interfaz que permite RoboRealm para comunicarse con la Mega.
El código adjuntado es el código de interfaz que permite el Mega a comunicarse a través de Bluetooth a RoboRealm software.


")









")
