Paso 12: La teoría detrás de él
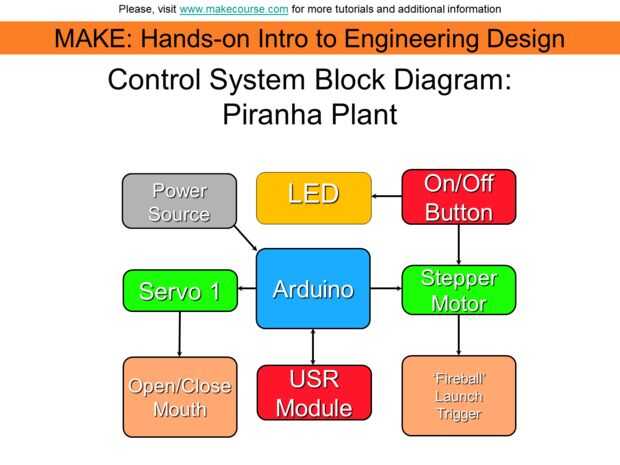
Sólo para que tengas una idea de lo que está haciendo el programa que vamos a ver en el diagrama de bloques.
El programa utiliza el sensor USR para tomar mediciones individuales 3. Cuando las dos primeras medidas son dentro de cierta gama, arduino activa el servo para abrir la boca. Después de unos 2 segundos, entonces cierra la boca.
La tercera distancia es responsable por el motor paso a paso, pero no puede activarse a menos que el interruptor de seguridad está apagado. El interruptor de seguridad se desactiva cuando la luz del LED se enciende. Cuando la seguridad está apagada y la tercera medida es dentro del rango especificado, entonces activará el motor paso a paso que es el disparador de lanzamiento de "Bola de fuego". Esencialmente el motor paso a paso tira el pedazo de pistón hasta que salga de la clavija.
Después de eso, se reinicia y comienza tomando las mediciones todo otra vez.








 Piraña planta Magdalena")




