Paso 8: Añadir código para el microcontrolador
A continuación que necesitas subir algo de código a su Arduino. Aquí está algún código de ejemplo muy sencillo que puede ayudarle a empezar.
Usted tendrá que modificar el código para calibrar sus motores y las dimensiones de su plataforma.
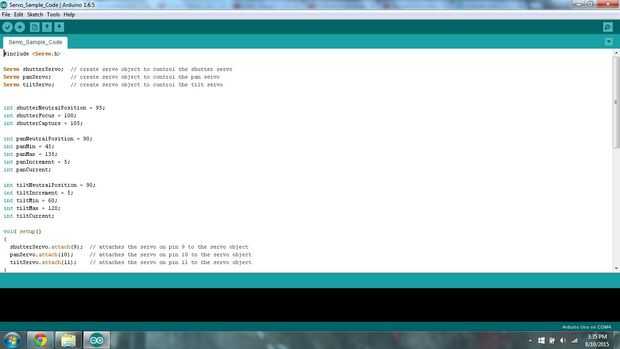
#include
Servo shutterServo; crear objeto servo para controlar el obturador servo Servo panServo; crear objeto servo para controlar la bandeja de servo Servo tiltServo; crear objeto servo para controlar el servo tilt
int shutterNeutralPosition = 95; int shutterFocus = 100; int shutterCapture = 105;
int panNeutralPosition = 90; int panMin = 45; panMax int = 135; int panIncrement = 5; int panCurrent;
int tiltNeutralPosition = 90; int tiltIncrement = 5; int tiltMin = 60; int tiltMax = 120; int tiltCurrent; void setup() {shutterServo.attach(9); / / conecta el servo en el pin 9 para el servo objeto panServo.attach(10); / / conecta el servo en el pin 10 a la tiltServo.attach(11) de objeto servo; / / conecta el servo en el pin 11 al objeto servo} void loop() {shutterServo.write(shutterNeutralPosition); panServo.write(panNeutralPosition); tiltServo.write(tiltNeutralPosition);
Delay(10000);
panCurrent = panMin; tiltCurrent = tiltMin;
para (int y = 0; y < = 12; y ++) {tiltServo.write(tiltCurrent); delay(2000); para (int x = 0; x < = 18; x ++) {panServo.write(panCurrent); delay(1000); shutterServo.write(shutterFocus); delay(2000); shutterServo.write(shutterCapture); delay(1000); shutterServo.write(shutterNeutralPosition);
panCurrent = panCurrent + panIncrement; } tiltCurrent = tiltCurrent + tiltIncrement; }
}









")
")


