Paso 1: La placa principal
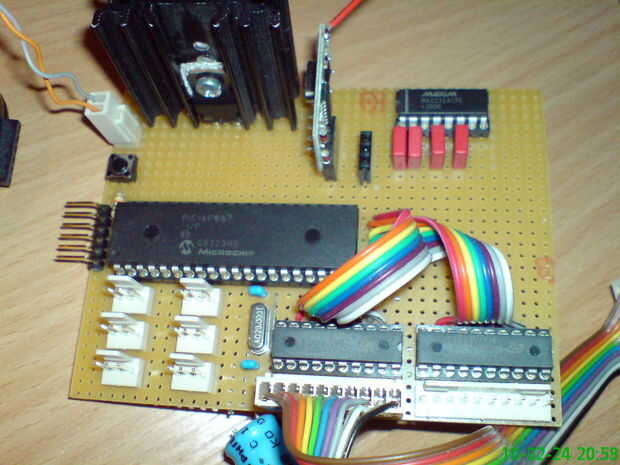


El corazón de este robot es un microcontrolador de 8 bits del PIC16F887. El secreto no está en el hardware, es en el código. Me di cuenta de las funciones muy básicas con el microcontrolador como medición de entradas analógicas de los sensores (intensidad de luz, temperatura, infra la medición de distancia), entradas digitales (sensores digitales, contactos), digital salidas motor de conducción un puente H con dos DC (conexión de piezas alta actuales como la cámara o power LED) y proporcionan la señal PWM para controlar velocidad del motor, control de motor servo (cabeza, brazos). Estas son funciones muy básicas y necesitan muy poca codificación usando lenguaje C.










")


")