Paso 1: Hardware: modelado, corte, impresión y montaje



Diseñamos la plataforma utiliza los motores servos porque son fáciles de encontrar y más baratos que los actuadores lineales. El rango de movimiento es un poco más limitado, pero estábamos diseñando para expresividad y no tanto para gama.
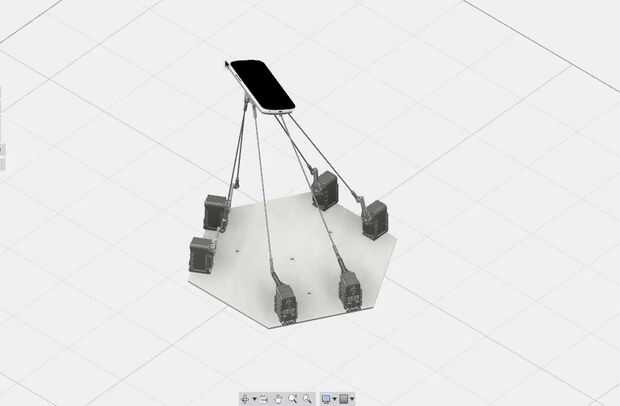
Antes de cortar metal y programación motores, Radamés diseñó una versión de nuestra plataforma mediante fusión 360 para conseguir cierta intuición sobre la gama de movimientos y posicionamiento de motor.
Los materiales que utilizamos fueron:
-1 x RaspberryPi (con fuente de alimentación de 5V/2A)
-6 x Dynamixel AX-12A motores
-1 circuito de x UART (con fuente de alimentación 12V/6A)
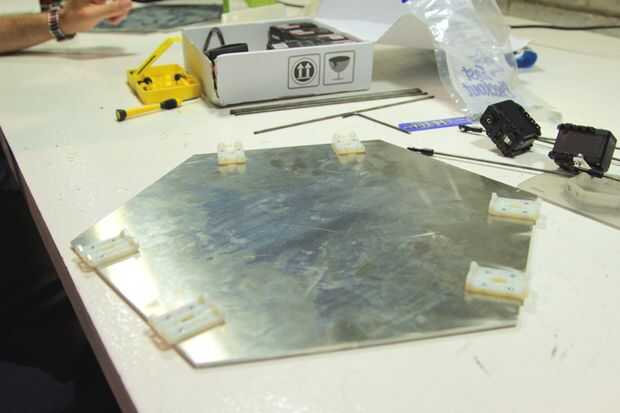
-1 x base de aluminio
-1 x plataforma de plástico
-12 x M3 rótulas
-6 barras roscadas
-6 x los soportes del servo
-6 x cuernos servo
-un montón de diminutos tornillos
Los soportes del servo y los cuernos vinieron con los motores que compramos, pero también les modelamos en caso de necesiten piezas de recambio. Más simple acrílico piezas pueden utilizarse para sostener cualquier objeto que necesita sobre la plataforma, pero puesto que hemos querido hacer teléfonos móviles en posición vertical, terminamos diseñando una plataforma personalizada. STLs se unen aquí. También pueden cortar los cuernos servo de 1/8" de acrílico o madera usando un cortador láser.



")









