Paso 3: Matemáticas: papeles
Antes de comenzar a enviar señales a los servos, pensamos que valdría la pena para familiarizarse con las matemáticas de la Stewart Platform.
A diferencia de los brazos robóticos articulados, la Stewart Platform cinemática inversa son más simples que la cinemática directa. Lo que esto significa es que es más fácil calcular las longitudes de la pierna y parámetros del motor dados la posición deseada para la plataforma, que al calcular donde la plataforma se encuentra para un conjunto dado de parámetros del motor. Esto es fine; queremos la cinemática inversa de todos modos, y así evitar resolver un sistema de 18 ecuaciones no lineales con 40 posibles soluciones.
Algunas de las ponencias que hemos encontrado no eran específicos de servo Stewart plataformas; simplemente describieron las matemáticas basado en longitudes de la pierna deseada y asume a veces que se utilizaría actuadores lineales. Este es el caso de este papel de diario de micrófonos, que describe un Stewart Platform muy específica y se centra en su cinemática adelante.
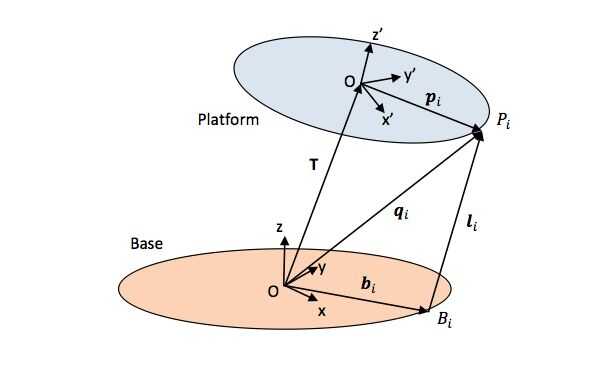
También encontramos dos documentos que fueron más específicos para servos. Por Filip Szufnarowski se describe el problema cinemático inverso muy bien, pero fue este documento de autor desconocido de Wokingham U3A matemáticas grupo que tenía más detalles y más limpia notación. Por ejemplo, esta imagen etiqueta a todos los puntos relevantes de una Stewart Platform con su correspondiente sistema de coordenadas.



")









