Paso 2: piezas

1) Arduino Duemilanove w / ATMega328
Esta es la nueva Arduino, y puesto que sólo lo conseguí hace unos días tengo una nueva. Sin embargo, el código es lo suficientemente pequeño que debe caber fácilmente en cualquier Arduino. Probablemente incluso podrían caber en un ATTiny (si construyo una unidad de control aparte de Arduino, el ATTiny 2313 parece una buena opción, es más pequeño y más barato, pero todavía tiene un montón de salidas y un interfaz serie UART)
2) vex Robotics plataforma
Tengo un kit Vex hace unos años para construir un robot controlado por radio para recoger cosas para un concurso de alta escuela. Construí la base básica "cuadrado bot" que tiene 4 ruedas impulsadas por dos motores. Si tienes alguna otra plataforma que desea conducir, podría sustituir otras bases de robot. Lo importante a notar es que Vex motores servos de rotación continua esencialmente, que utilizan modulación por ancho de pulso para rapidez y en qué dirección a la señal. Los motores de Vex son bonitas porque tienen una alta gama de voltajes de operación, en algún lugar entre como 5 a 15 voltios. Estoy usando 12V porque tenía una batería de 12V. Para la mayoría de los servos de hobby, necesita una tensión más baja (a menudo 6 voltios).
3) batería de
Un robot es inútil sin una fuente de alimentación. Para probar usar un adaptador de 9V estándar-fuente de RadioShack, pero para funcionamiento inalámbrico encontré un paquete de baterías de NiMH de 12V en un portátil antiguo. Aunque no mantiene suficiente de carga para funcionar la computadora portátil conduce mi robot Vex muy bien. También puede alimentar el Arduino usando el perno de la entrada Vin en el conector de alimentación, el Arduino será regular los 12V hasta 5 y hasta la salida por el pin de salida de 5V en el conector de alimentación.
4) tablero básico
Actualmente estoy usando un protoboard para conectar todo. Finalmente voy a obtener una mejor tabla de prototipos y soldadura en algunas conexiones más permanentes pero por ahora la placa hace que sea fácil cambiar las cosas. Mi placa es "Básico protoboard" de SparkFun, sólo un protoboard en una placa de metal con 3 terminales.
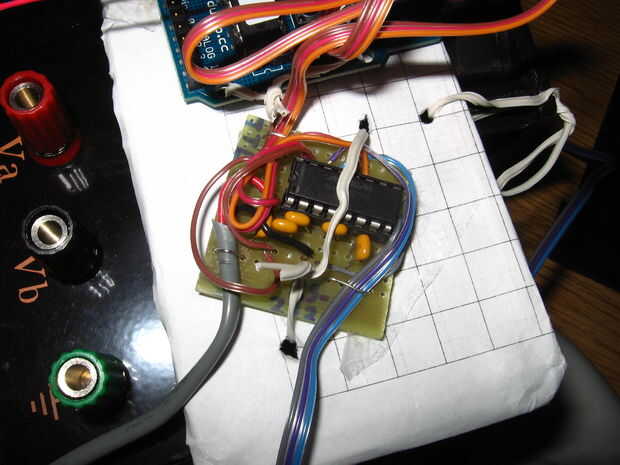
5) convertidor RS232-TTL MAX232 basado
Si usted desea conducir su robot utilizando una conexión de puerto serie RS-232 (en contraste con el Arduino de construido en USB) se puede utilizar un convertidor RS232-TTL. Estoy usando un MAX232 porque tenía unos pocos de ellos ahí y soldado en un pequeño trozo de placa de prototipos con los condensadores requeridos. Necesito RS-232 porque mi viejo portátil sólo tiene un puerto USB y estoy usando eso para un controlador de juego para manejar el robot.
6) extras piezas como se desee
Para la fácil depuración del protocolo serial, puse un LED RGB en él (uno con mi causa de orden Arduino sonaba frescos). La luz parpadea roja, verde, azul en orden al Arduino botas hasta mostrar el robot ha reiniciado y luego se enciende en verde cuando un motor paquete ha sido recibido, azul cuando se ha recibido un paquete de ventilador y rojo cuando se ha recibido un paquete mal o desconocido. Para conducir el ventilador he utilizado un transistor NPN estándar (las mismas que demostré en mi último Instructable) y un resistor entre el transistor y el Arduino (el transistor era dibujo demasiado corriente y calefacción encima del Arduino, así que poner una resistencia limitadora detenerlo).




 Chasis de plataforma-un Robot robótica Arduino DIY de piezas de repuesto")


")

: el controlador del Motor del actuador del robótica Arduino")


