Paso 4: Agregar una Netbook para explorar mundos desconocidos desde una distancia

Hay muchas maneras de conseguir este trabajo, muchas son probablemente mucho más fáciles que la mía, aunque no estoy familiarizado con el proceso o secuencias de comandos de idiomas así que opté por usar Linux y C++ para crear un enlace inalámbrico de control entre mi estación base (también conocido como viejo ThinkPad) y mi nueva netbook Lenovo IdeaPad que se conecta a la base de la unidad de Arduino. Ambos PC apuntan a Ubuntu. Mi ThinkPad está conectado a la LAN de mi colegio y mi IdeaPad está conectado a mi punto de acceso WiFi que también está conectado a la LAN de la escuela (no pude obtener un confiable flujo de vídeo de la escuela WiFi desde todo el mundo lo está utilizando, para configurar mi propio router para proporcionar una buena conexión). Una buena conexión es especialmente importante en mi caso ya que no he implementado ninguna comprobación de errores o tiempo de espera. Si la conexión de red, de pronto cae, el robot sigue adelante hasta que choca contra algo o y detenerlo. Este es el principal factor detrás de mi decisión para frenar la transmisión por engranajes los motores abajo y aplicar un límite de velocidad de software.




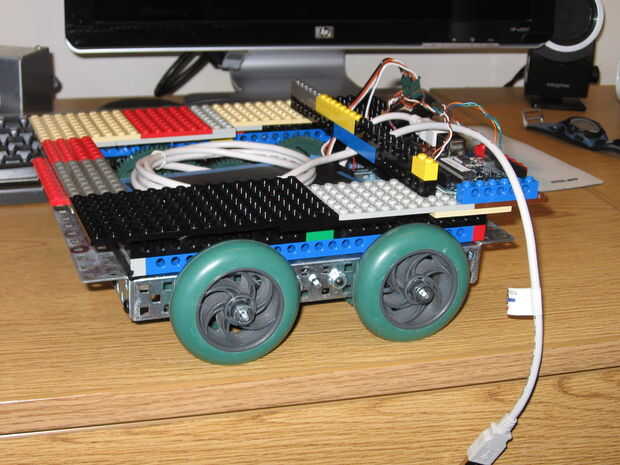
 Chasis de plataforma-un Robot robótica Arduino DIY de piezas de repuesto")


")

: el controlador del Motor del actuador del robótica Arduino")


