Paso 2: Mejorar la estabilidad



Las pelotas de ping pong eran más lentos el robot, debido a la alta fricción con cualquier superficie que encontró. Fueron reduciendo la distancia al suelo. Usé una rueda de la silla de oficina y un pedazo de cartulina gruesa para mi primera prueba. La rueda de la silla de oficina era demasiado grande, causando problemas de dirección, al ir hacia atrás. Pero la idea era buena, aunque.
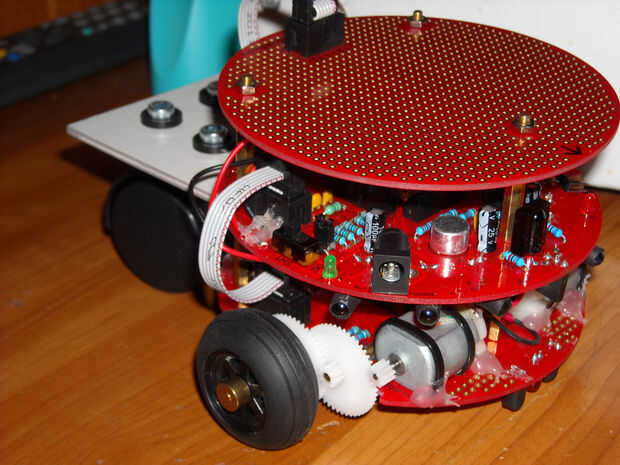
La siguiente prueba fue con una plataforma diferente, uno más flexible, hecha de plástico. Además, he utilizado una rueda más pequeña. Pero luego me di cuenta que la plataforma que he de construir en la parte posterior del robot cubría mi batería, y no pude quitar sin desmontar la plataforma entera, así que he montado la batería sobre la plataforma.
La rueda pequeña también tenía el mismo problema que la rueda de la silla de oficina: cambió la dirección del robot, que era algo realmente malo.
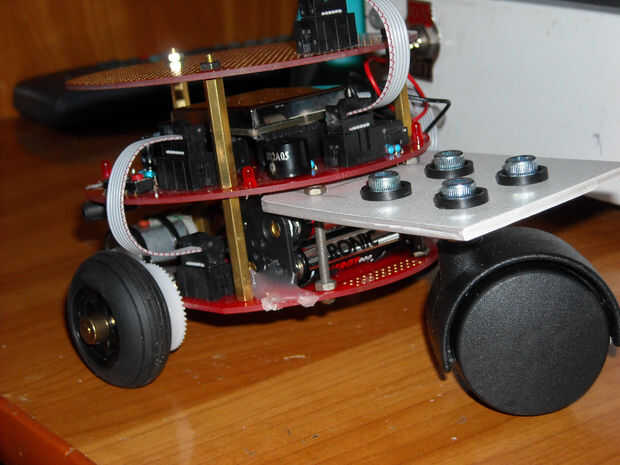
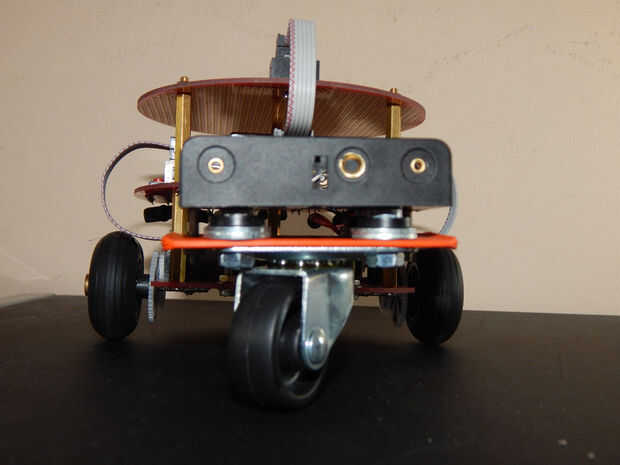
La solución fue reemplazar la rueda pequeña con una rueda giratoria de bola, para resolver el problema de dirección.
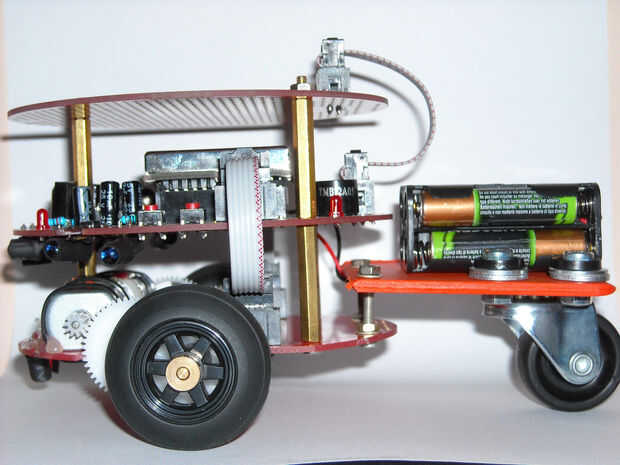
También he actualizado el paquete de baterías a un paquete de baterías AA de 4 x, en lugar de las baterías del AAA 4 x. Las pilas ahora duran hasta 4 - 5 veces más que las pilas AAA.
Además, pasó de las baterías regulares a baterías recargables NI-MH.
La primera prueba de sistema anticolisión: enlace









 Chasis de plataforma-un Robot robótica Arduino DIY de piezas de repuesto")


