Paso 3: Sustituir la Junta de expansión y mcu


Como he dicho en la introducción, el mcu fue limitado por la empresa de fabricación y utiliza un sistema propietario. También, tuvo que ir en modo de programación antes de cualquier cosa en la podría subir.
La Junta de expansión fue inútil para mí, así que solo me lo quitaron.
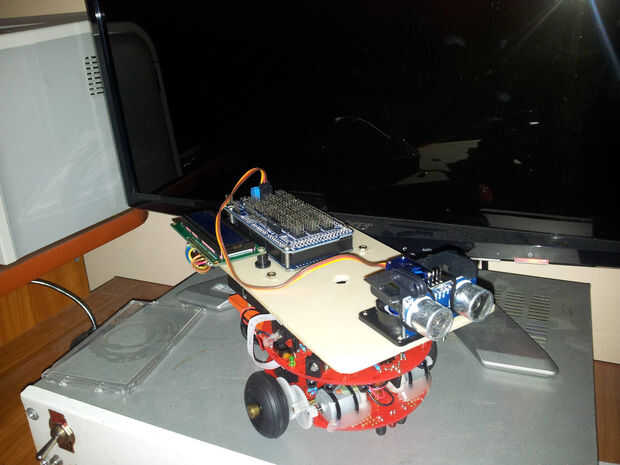
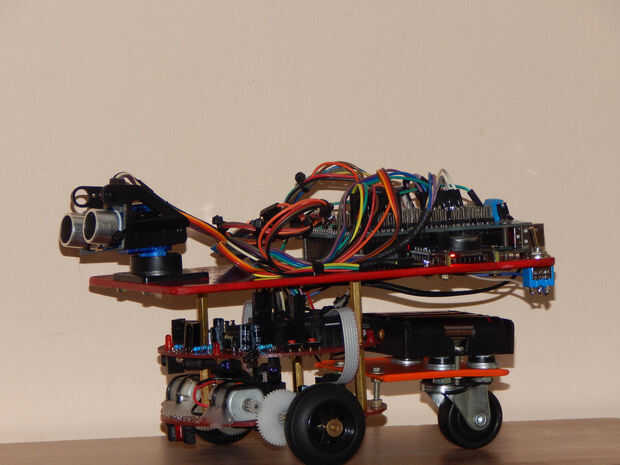
Luego añadí un pedazo de plástico, que pinté en rojo (por lo que correspondería con el color principal del robot).
Se añade lo siguiente en la parte superior del tablero de plástico:
-Arduino Mega 2560 rev. 3 (clon chino, usando CH340)
-Escudo sensor para Mega 2560
-Módulo Bluetooth HC-06
-16 x 02 LCD
-Módulo RTC
Interruptor de encendido/apagado
-Torre Pro Micro Servo 9g SG90 con soporte de montaje y soporte del sensor ultrasónico
-HC-SR04 sensor ultrasónico
He utilizado el zócalo viejo del mcu en el pcb a utilizar cables para arduino. Hasta ahora, que he utilizado los LEDs, motores, altavoces, micrófono y AREF pin.
Para hacer la lista:-sensores IR.
Parece un gran lío de cables, pero que era la idea: una plataforma experimental! puede tener acceso a conexión, en la parte superior y usarlo más tarde. Sin embargo, haré algunas manejo de cables, cuando el proyecto se hará casi.
Este es un examen utilizando ArduDroid en sistema operativo Android, y el robot ejecuta el bosquejo de ArduBot de TechBitar: enlace
Además, examen de conducir pequeña aplicación Java que he desarrollado: enlace









 Chasis de plataforma-un Robot robótica Arduino DIY de piezas de repuesto")


