Paso 4: Cambiar el sistema de conducción original

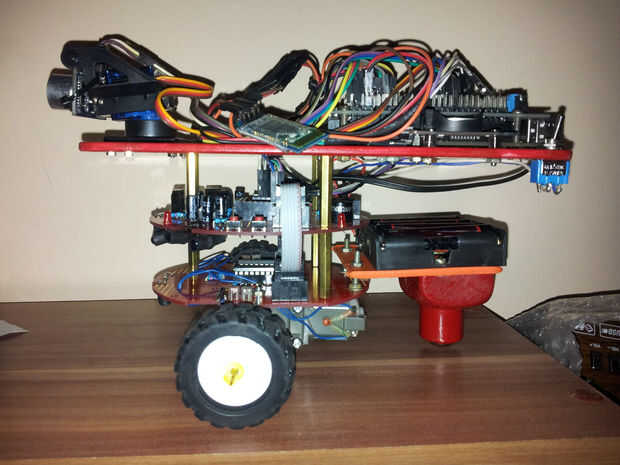


Yo he sustituido el original sistema de conducción con un sistema de tipo de caja de cambios. Los motores ahora trabajan de forma independiente, el peso de las robot(load) no afecta a los árboles, y puede ser fácilmente configurado en 4 diferentes relaciones.
El sistema de caja de cambios es este: enlace
Tuve que modificar los ejes, porque eran demasiado cortos.
Usé algunas varillas de 3mm colocación alrededor de e impresora vieja que recogido para las piezas de hace mucho tiempo. Se fabrican de acero, el hex original de 3mm que estaban hechas de algún metal raro, que podría romper fácilmente cuando se aplica altas fuerzas.
Las ruedas son 42 x 19 mm como los de este enlace: enlace
La parte interior era en forma de D, y tuve que pegar en las varillas.
Las ruedas tienen crestas en el interior, para los codificadores rotatorios. Las ruedas y los codificadores rotatorios fueron diseñados para motores de caja de engranajes pequeña y tuve que modificar para trabajar con la caja de cambios que monta.
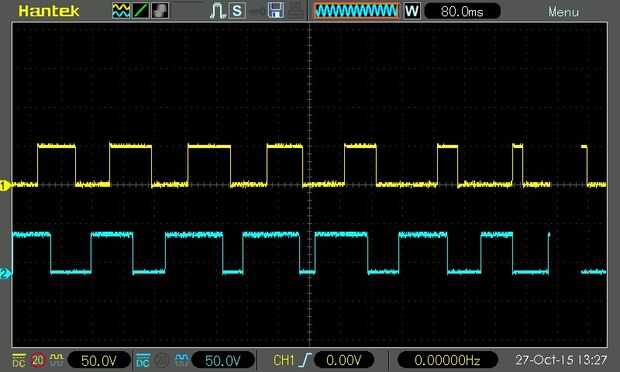
Después de conectar los motores y codificadores, probé con mi osciloscopio, y parece que funciona tal como lo publicitan. Sin embargo, software habla allí es un error leve y que tipo de petardeo de vez en cuando.









 Chasis de plataforma-un Robot robótica Arduino DIY de piezas de repuesto")


