Introducción
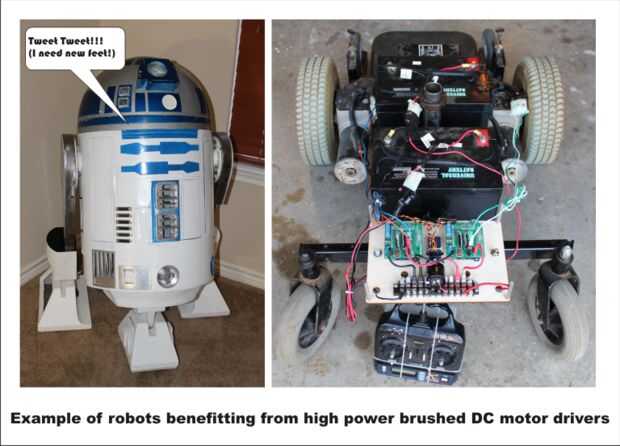
Aquí es un fresco cepillado Motor de la C.C. que se puede utilizar para sus proyectos robóticos con ruedas dos grandes. La primera vez que hice esto fue para mi R2D2 réplica vida. En el momento R2D2 es necesita zapatos nuevos, por lo que detallaré cómo trabajar en algo como eso más tarde. En este Instructable, por otro lado, voy a trabajar con una plataforma de silla de ruedas, ya que son grandes entradas para dos proyectos robóticos de rueda!
Yo he codificado este algoritmo varias veces ahora. Yo lo llamo RC2PWM porque recoge la señal de radio de Control remoto (RC) y lo transforma en un PWM de Motor puedo usar para controlar un motor DC de cepillado. He codifiqué para HC11 (sí, soy ese viejo...), 80C 51, AVR, MSP430 y ahora un nuevo microcontrolador en el mercado, el PAC5220.
De todas estas implementaciones, mi favorito tiene que ser el PAC5220 por cuánta integración ofrece. Como veremos más adelante, esto no es un micro deben ser subestimadas.
En caso de que usted quiere conseguir más profundo en cómo funciona el algoritmo de RC2PWM, yo he detallado la mayoría de los aspectos dentro de mi blog. Usted puede encontrar estos anuncios aquí:
Divertirse con capturas de entrada - parte 1
Divertirse con capturas de entrada - parte II
Salidas PWM para Control de Motor - introducción
Salidas PWM para Control de Motor - inicialización
Salidas PWM para Control de Motor - protección
Salidas PWM para Control de Motor - teoría de puente de H
Salidas PWM para Control de Motor - por último, control
El proyecto: Una Base de la silla de ruedas eléctrica como un Robot de control remoto
Para validar mi algoritmo de RC2PWM en el nuevo microcontrolador, utilizo una base de silla de ruedas eléctrica. Esta es la forma más rápida de obtener algo. Podría soldar con autógena una plataforma y pasar por la molestia de crear un robot, pero que tomaría demasiado largo. Lo que quiero es conseguir estos controladores te va así puedo devolver mi réplica de R2D2 en el modo de caminar.
Materiales necesarios:
- Un sillón de ruedas eléctrico (que yo sepa, todas ellas constan de dos grandes motores de la C.C.)
- Dos tableros del cuerpo de HYDRA-X20 (EH-HYDRA-X20-1)
- Dos HYDRA-BLDCM1 tres fase conductor cabeza juntas (EH-BLDCM1-1)
- Un combo RC Radio y receptor
- Terminales pala hembra conector
- Alambre de calibre 14
- Regleta de terminales del conector de la espada
- Plataforma de madera
- Atar el rap (o método preferido para asegurar los alambres y cables)













