Paso 5: montaje






















* Nota: Antes de ensamblar Asegúrese de prueba y posición de cada servo en 0 mediante RoboPlus Manager. También es importante asignar diferentes ID para cada servo.
Voy a seguir actualizar este tutorial con el tiempo mientras trabajo en Polyro v2.
El diseño original de los archivos colocados en Illustrator y PDF formatos; Esto es para ayudar a dirigir a la Asamblea y le permite hacer cambios al diseño original. También intentó agrupar a partes específicas dentro de los tres PDF (brazo piezas, piezas de la cabeza, etc..). Debe ser fácil de montar POLYRO utiliza el archivo de Illustrator, PDF y fotos del robot terminado.
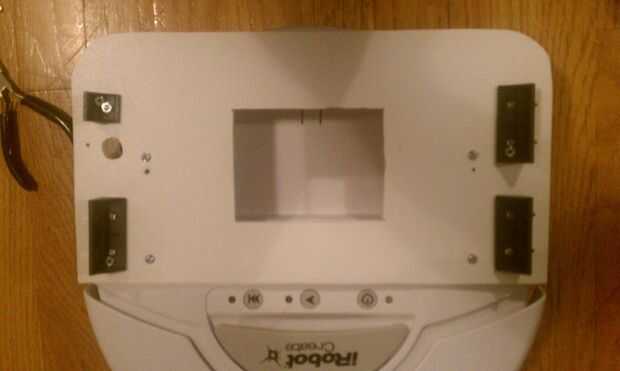
Las escuadras de plástico plegado lateral fueron escogidos para simplemente el proceso de montaje y añadir estabilidad al robot. Durante el montaje, a partir de la parte inferior y suba. Perfore un agujero la * Polyro Base (ver imagen de arriba) lo suficientemente grande para el iRobot Cable Serial para pasar antes de introducirlo a la. Montar el Soporte de muelle de soporte de Kinect antes de agregar las tarjetas verticales de metal a la Base de montaje de Kinect (ver imagen de arriba).
Brazos
Usé 4 x 5/8 "tornillos de los brazos del metal y los soportes (ver imagen de arriba) del hombro. Los pernos de la Bioloid perno y tuerca también un gran trabajan al ensamblar el brazo.
Cabeza
Cuando se prepara para montar las cámaras USB en los servos AX-12, puede disgard la abrazadera-como base, pero estar seguro de mantener la pieza negra circular que se ajusta en la parte inferior de la cámara. Esta pequeña pieza circular se enroscan en el soporte de Servo modificado de Bioloid (formado en un círculo usando el Dremel). Una vez hecho esto, es fácil ajustar las cámaras USB en los servos.
Si hay otras partes en el proceso de montaje que no están claros, sólo hágamelo saber y voy a actualizar este tutorial.


")








)")

