Paso 6: cableado






http://www.Ros.org/wiki/Kinect/tutorials/Adding%20A%20Kinect%20to%20an%20iRobot%20Create
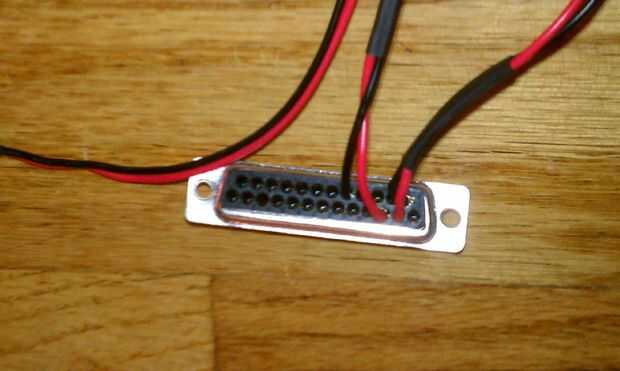
En lugar de utilizar el cable serie crear o RooStick (como en el tutorial), yo simplemente funcionó directamente desde el conector de la bahía de carga. Para la alimentación de los Servos AX-12, simplemente repitió el proceso, sólo empalmar un cable de 3 pines de Dynamixel (referencia por favor la foto de abajo). No olvide cubrir los empalmes de la soldadura con encogimiento del calor para evitar cualquier cortocircuito. Una vez completo, el Kinect y AX-12 servos se alimenta de la batería de crear. Me gustaría finalmente cargar el netbook del iRobot Create Home Base (como en este proyecto) o reemplazar la netbook con algo que se puede ejecutar desde batería de Create (como el Roboard).


")








)")

