Paso 4: Poner las cosas dentro de la cabeza del Robot
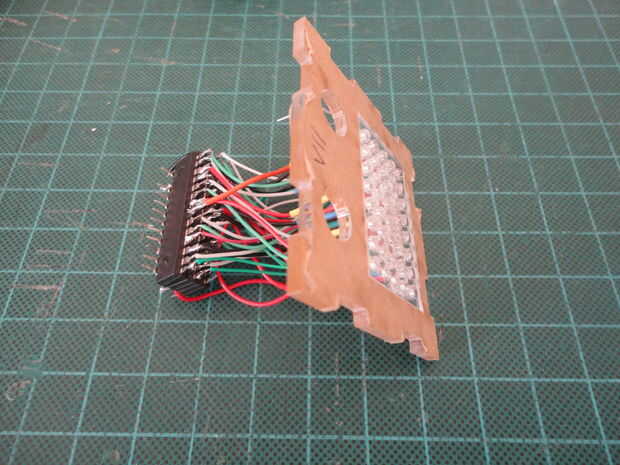
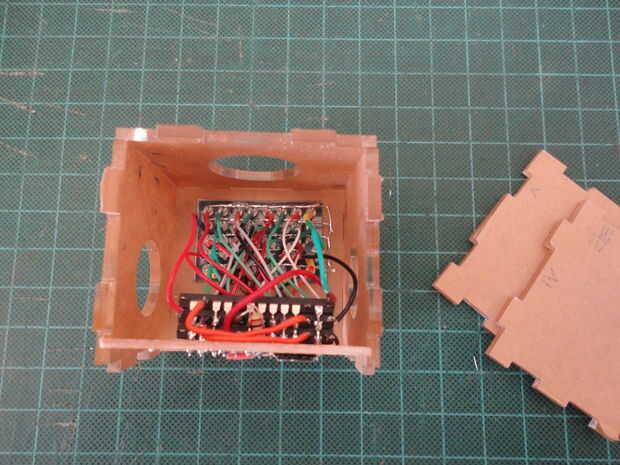
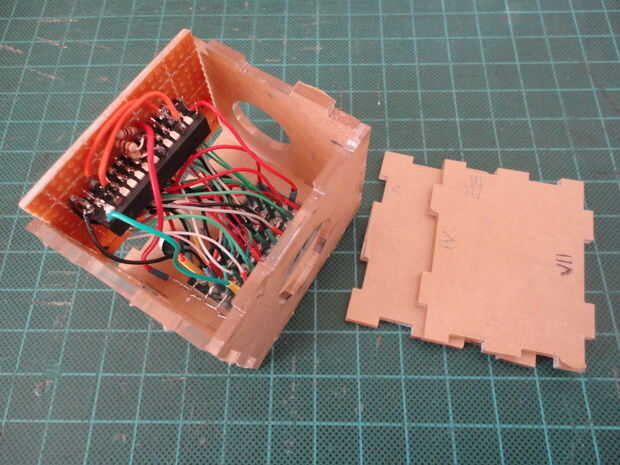
En primer lugar, lentamente apreté los ICs conectados y LEDs en el Head(box) lentamente, incluso antes de la soldadura inferior IC (#1) de la PCB para ver si cabe. Y para ver donde se ubicaría el ICs en la pieza posterior de la cabeza del robot.
Era tipo de la apretado ya los cables rígidos después de soldadas a la ICs y LEDs.
Después de eso corté un trozo de PCB con el tamaño de la pieza posterior de la cabeza del robot.
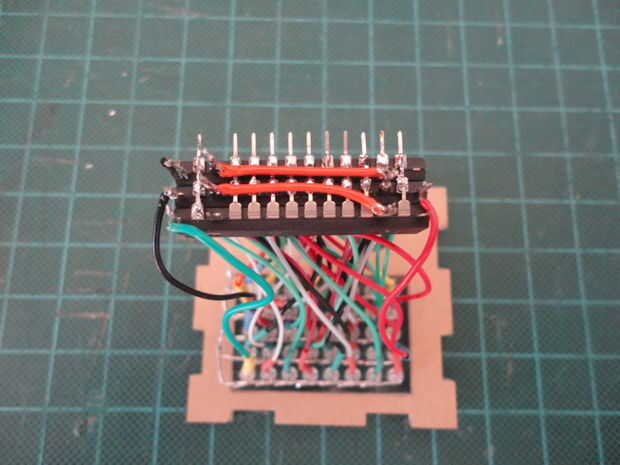
Y la parte inferior IC(#1) de la PCB de la soldadura. Luego agrega las resistencias de 2K a th PCB y soldadas para perno en consecuencia.
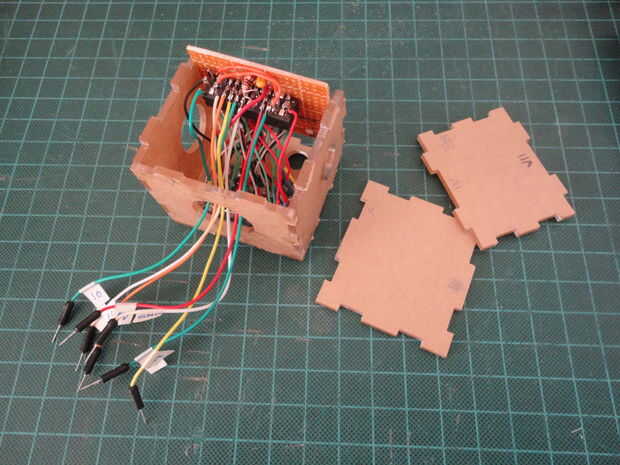
Luego soldamos los cables siete puente a ICs
Pin de pecado en la parte inferior IC, este cable de puente fue a Arduino pin D11
Pernos de SCLK cada IC, este cable de puente fue a Arduino pin D13
Pernos de XLAT cada IC, el alambre puente fui a Arduino pin D9
Pins en blanco en cada IC, el alambre puente fui a Arduino pin D10
Pernos del GSCLK cada IC, el alambre puente fui a Arduino pin D3
Utilicé la cinta de enmascarar para etiquetado los cables de puente, así que sé donde los cables de puente se conectaría a la referencia futura.







")





