Paso 4: Instalar todo el Software y hacer algunas pruebas.


Instalar el Software de Arduino y bibliotecas:
Después de instalar Arduino Extracto
i2cdevlib-master.zip
copiar el I2Cdev (está en la carpeta de Arduino) carpeta a carpeta de la biblioteca Arduino:
En mi PC: C:\Program Files (x86) \Arduino\libraries
Luego copie la carpeta de MPU6050 también en la carpeta de la biblioteca:
En mi PC: C:\Program Files (x86) \Arduino\libraries
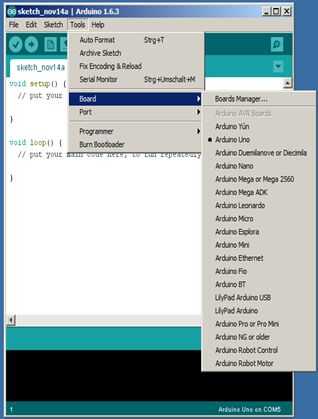
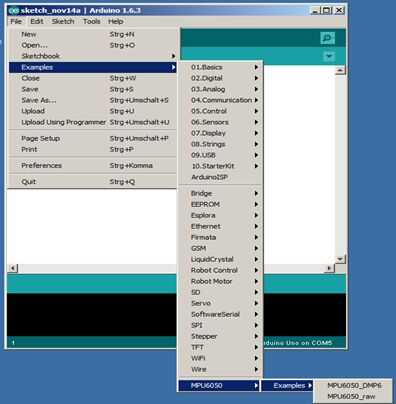
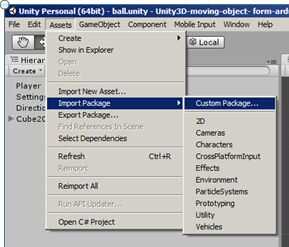
Cuando usted ahora inicio el Arduino Software y a ver cuando vas a archivo -> ejemplos -> MPU 6050 -> MPU6050_DMP
Has hecho lo correcto.
Ahora conectar el Arduino a un puerto USB y extraer:
MPU6050_calibration_v1.1.zip y haga clic en abrir MPU6050_calibration.ino
De ahora en adelante debe el 6050 MPU son absoluta mentira precisamente sobre un terreno.
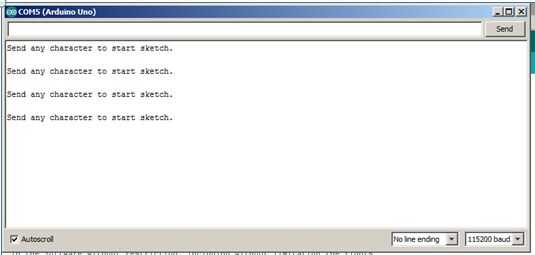
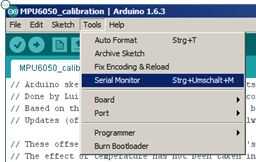
Subir con un clic en la flecha de la MPU6050_calibration.ino a tu Arduino UNO y comienza al serial monitor:
Enviar un carácter o presione c para iniciar la calibración, nada debe alejar el MPU 6050, ir o no se mueven.
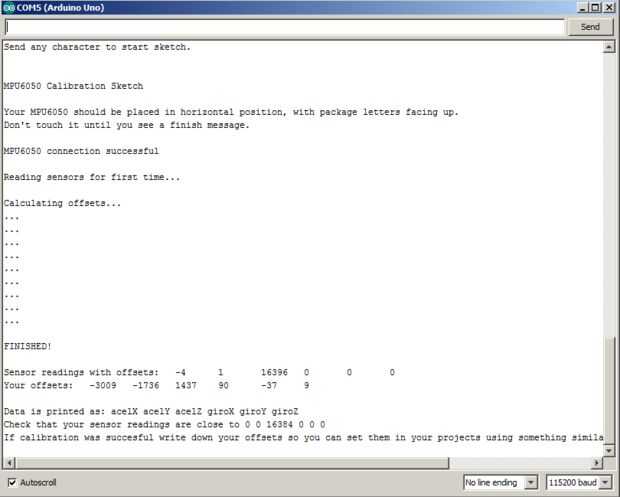
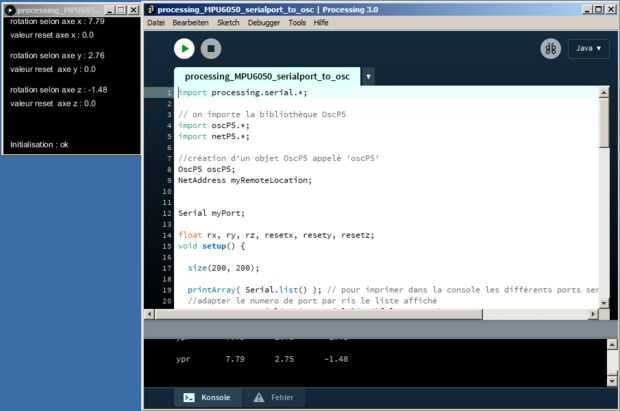
Cuando todo está funcionando bien tienes algunos valores, usted puede almacenarlos en un archivo de Bloc de notas por ejemplo.:
Cuando después de 5 minutos nada, calibrar de nuevo.
Cuando termine, extracto: MPU6050_DMP6_T y MPU6050_DMP6_T.ino abierto con el software de Arduino:
Ahora usted puede agregar su calibrar ajustes a este archivo, por ejemplo:
fuente de su propio giro desplaza aquí, escala mínima sensibilidad
mpu.setXGyroOffset(84); reemplazar con usted los valores
mpu.setYGyroOffset(-39); reemplazar con usted los valores
mpu.setZGyroOffset(-8); reemplazar con usted los valores
mpu.setZAccelOffset(1401); reemplazar con usted los valores
-----------
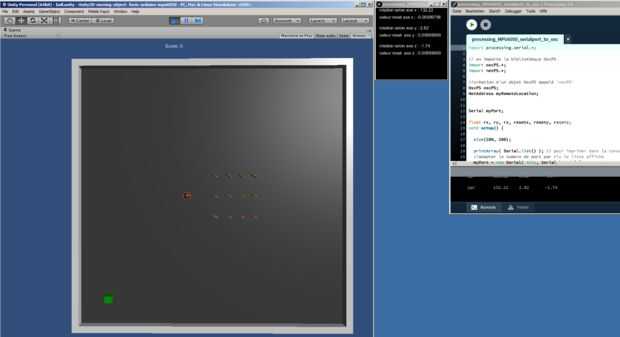
¿Estás listo? Para luego subir a tu Arduino y pasar al siguiente paso (proceso y unidad)



")

 - Makeblock, Arduino, Droidscript")







