Paso 1: Diseño de circuitos y teoría de operación
Con esto en mente decidí utilizar un sensor de matriz de LED invertido. Cuando la luz cae en la ensambladura del P-N en un LED, un voltaje que es proporcional a la intensidad de la radiación produce. Al contar con dos LEDs conectados ánodo a cátodo, un LED produce un voltaje positivo en respuesta a la luz y se producirá un voltaje negativo. Cuando la cantidad de luz que incide sobre los LEDs es igual estas tensiones se suma a cero. Sin embargo, si un LED entra más luz en lo entonces una tensión de red existe y puede ser salida. Dependiendo de si la tensión de salida positiva o negativa se sabe que LED es conseguir la mayor intensidad de luz incidente.
Ya que este diseño se basa en una tensión y una corriente de no tendrá consumo no en la etapa del sensor. Esto es en contrato un resistor sensible luz o transistor que tendrá un poder dibujar. Otra ventaja del sensor LED es que podemos incrementar la sensibilidad al conectar varios LEDs en serie en ambas localidades de polaridad. Nuestro diseño final utilizará 5 a 10 LEDs conectados en serie para ambas localidades la polaridad hacia adelante y hacia atrás con el fin de mejorar la capacidad de respuesta. Por ahora sólo usaré uno en cada localidad como he mostrado en el esquema.
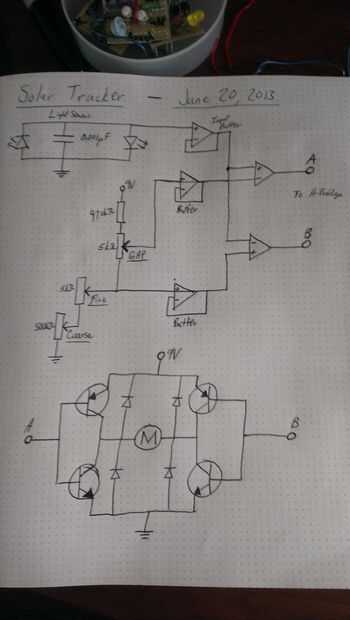
La salida de la etapa del sensor se conectará primero a un amplificador operacional configurado como un tampón. Esto evitará que cualquier pequeña corriente en el circuito de aguas abajo causando cambios en la tensión en la matriz del sensor. La salida de este buffer alimentará dos otros amplificadores op utilizados como amplificadores: uno sin inversión y una inversión. Las entradas complementarias a estos amplificadores op se establecerá por una serie de potenciómetros y la salida del amp op enviará al puente H para manejar el motor.
La etapa de entrada y calibración de usuario se compone de tres potenciómetros y una resistencia. Esta configuración es básicamente un divisor de tensión ajustable. La resistencia (470kohm. Lo sentimos, se me olvidó etiquetar cuando saqué el esquema) trae al voltaje en el potenciómetro y prohíbe el sistema de tener una trayectoria de baja resistencia del ánodo al cátodo. El primer potenciómetro desarrolla una diferencia de tensión entre los dos cables a la etapa de op amp. Este ajuste se expande o contrae el intervalo de valores estables en el sistema que permite cierta disparidad que existe entre la intensidad de la luz en el LED sin conducir automáticamente el motor. Los otros dos potenciómetros ajustan el punto de equilibrio del sistema. Éstos se deben establecer tal que el motor no gire cuando igual iluminación para los LED.
Debo señalar que constantemente se dibujarán corriente a través de la etapa de entrada y calibración. Con el fin de limitar la corriente a un valor muy bajo he seleccionado valores de resistencia bastante elevado (el más alto que tenía en mano de diseño). Antes de hacer el PCB prototipo que será medir la disipación de energía ociosa del circuito utilizando dos multímetros, uno para la corriente y voltaje y optimizar esta etapa para consumo mínimo energía parásita. Potencia (P) es igual a corriente () tiempos de tensión (E), o P = I * E.
Control de la salida de la etapa de procesamiento que los transistores están abiertos en el puente en H. Cuando una va a alto, el transistor PNP cerca y el transistor de NPN se abrirán. Cuando se baja ocurrirá lo contrario. El circuito de proceso es diseñado tal que cuando A es alta, B baja y visa versa. Con una alta y B baja, una corriente pasará a través del motor de derecha a izquierda como se muestra en el esquema. Si B es alto y A es baja, la corriente pasará por el motor de izquierda a derecha. Esto hará que el motor al girar en diferentes direcciones dependiendo del estado de entrada y finalmente que el panel solar alinear directamente frente al sol.
Los diodos en puente H, llamados diodos de flyback, están allí para evitar daños en el circuito. Al manejar una carga inductiva como un motor de grandes picos de voltaje pueden ocurrir cuando cambio actual. Una bajada brusca de la corriente induce un pico de voltaje grande y conectando diodos como se muestra la corriente se da una ruta para viajar pero que no fríe nuestra electrónica.



")








")
