Paso 3: Sistema de Control
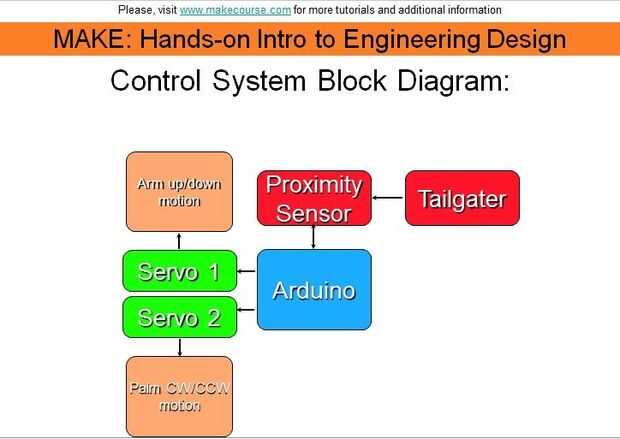
El sistema de control para este proyecto es bastante simple. El sensor de proximidad se une en el exterior de la caja. Para el dispositivo de sobremesa que tengo, es sobre la superficie lateral. Si esto fue en un coche real, el sensor tendría que ir a algún lugar en la parte trasera del coche.
El sensor HC-SR04 tiene 4 pines de ella:
VCC - conectará a Power IN
Trig - se conecta a la clavija 3 en Arduino
Eco - se conecta al pin 2 de Arduino
GND - se conectará a tierra
Brazo Servo:
Hilo negro/marrón - esto será generalmente el suelo pero consulte documentación del servo el servo específico
Cable rojo - esto será generalmente la potencia pero consulte documentación del servo el servo específico
Cable blanco/naranja - se conectará al pin 6 de Arduino
Servo de mano:
Hilo negro/marrón - esto será generalmente el suelo pero consulte documentación del servo el servo específico
Cable rojo - esto será generalmente la potencia pero consulte documentación del servo el servo específico
Cable blanco/naranja - se conectará al pin 5 de Arduino
Y asegúrese de que los carriles de alimentación protoboard están correctamente conectados a la Arduino. El riel de 5V de arduino '+' y el '-' carril al pin GND de arduino.













