Paso 7: Agregar algunos electrónica al blindaje del motor





¿Está todavía caliente el soldador? Tiempo a añadir algunas de las campanas y silbatos.
Como se puede ver en las fotos, he probado los componentes y programación con un protoboard conectado. Ya he hecho el trabajo pesado puede omitir esta parte, pero no te duele Compruebe antes de todo en su lugar.
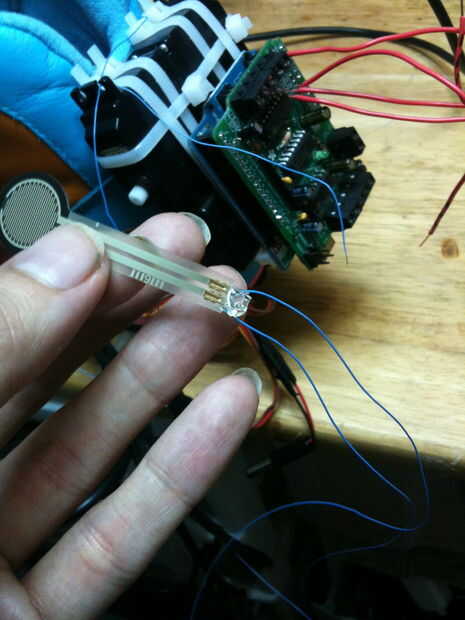
Después de que el programa está subido (Publicada al final de la instrutable) podemos permanentemente montamos las piezas. En primer lugar, le Solde un resistor y a uno de los pines del LED y una longitud de cable a los pines.
Que montaje a continuación se empuja a través de un socket cordón, y los cables son funcionó a Arduino, con pegamento caliente para mantener todo en su lugar y fuera del camino. Asegúrese de saber cuál de los cables va a la patilla positiva del LED!
A continuación se monta el sensor de fuerza. Soldadura no se aconseja como el plástico puede derretirse, por lo que envuelve un alambre alrededor de los conductores y caliente había pegado en su lugar. El sensor entonces fue pegado y conducto grabado en la parte inferior de la zapata, justa donde descansaría mi talón.
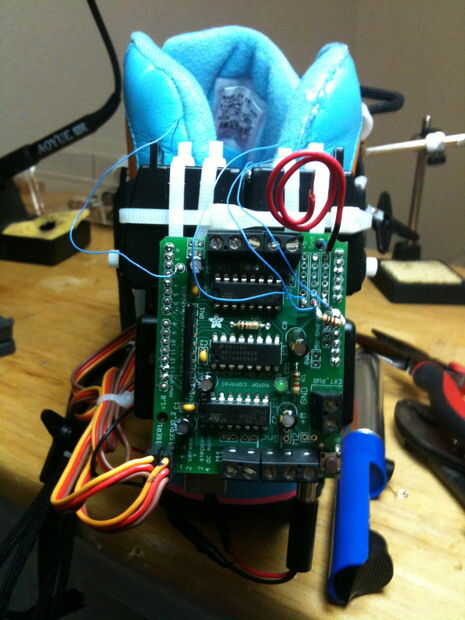
Los cables, también pegados y con cinta en su lugar, suban por la parte trasera del zapato y el Arduino.
Finalmente, después de agarrar otro resistor y un poco de alambre de calibre medio, podemos comenzar soldar todo en su lugar:
1. va el cable positivo del LED al pin digital 2.
2. un fuerza cable del sensor (no importa cuál) se suelda a + 5v.
3. el otro cable del sensor de la fuerza va al Pin analógico 0.
4. conectado también a Ana. Pin 0 es una resistencia. El otro extremo de la resistencia va a tierra.
5. también conectar el pin negativo del LED a tierra.
6. A la cinta de cuatro pulgadas helicoidal de alambre se suelda a Analog Pin 5. Este es el touch switch - tocar este alambre firmemente hará que los servos mover a la posición desbloqueada.
7.por último, conectar los servos, asegurándose de obtener la orientación correcta. Mi sketch de Arduino asume el servo de la izquierda (mirando desde atrás) está conectado al pin de servo más derecha, aunque esto puede cambiarse fácilmente en el software.
La electrónica se acaban!









")



