Paso 6: Electrónica y cableado
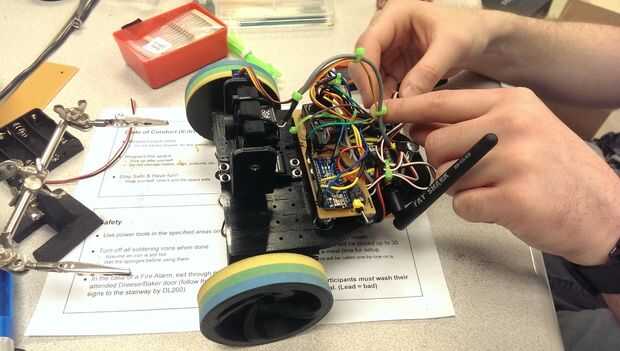
Hay bastantes electrónica en este proyecto. Los componentes electrónicos principales son el Arduino, RC transmisor/receptor y el sistema FPV. La batería que utilizamos fue una batería de LiPo de 3S. Esto es una 11.1V y 1, 300mAh batería y yo calculamos que permitió durante unos 30 minutos de uso continuo del robot. Realmente podría utilizar cualquier batería que desee utilizar, pero debe ser al menos 6V. Esto es debido a usar reguladores lineales de 5V. Para obtener 5V de ellos necesita suministrar con al menos 6V.
Como las conexiones, hay algunos de ellos. Para iniciar cosas fuera, tenemos que conectar la energía al robot. Ya que utiliza una batería de LiPo, tuve 2 enchufes de poder que podría utilizar. Usé el equilibrio enchufe para alimentar el transmisor FPV y la clavija de carga para todo lo demás. La batería se encuentra en el cuerpo principal para tener que tender cables desde la parte superior del cuerpo a través de un agujero a la batería. Una vez que se hace la masa de la batería irá a Arduino, el receptor RC y el regulador de 5V. El hilo va a un polo del interruptor al lado de la Arduino. El otro polo tendrá una conexión para el Vin en el Arduino y el Vin en el regulador de 5V. La conexión siguiente y último es de la Vout del regulador de 5V va al pin caliente del receptor RC.
Luego es conectar los servos. La manera de que conecte los servos al receptor RC se representan que Suspensión cardán en los controles del transmisor RC el cardán en la cámara en el robot y que se controla el movimiento del robot (adelante, atrás, girar a la izquierda y gire a la derecha). La manera que tenía establecido era utilizar el stick izquierdo del transmisor RC para controlar la cacerola/la inclinación en el cardán en la cámara. Esto requeriría el servo tilt para conectarse a la válvula reguladora del receptor RC y el servo pan conectarse al timón del receptor RC.
Ahora la batería y el cardán de cámara son conectados y configurados. Si desea probar el stick de la cámara en el robot, este sería el momento para hacerlo.
Luego es conectar los servos de la rueda. Esta es la parte difícil. Directamente no puede controlar estos servos con sólo el RC transmisor/receptor mientras que usa solamente un cardán en el transmisor. Veremos lo se establece en el siguiente paso.





")







